

Mikroelektronika d.o.o.
Carte de clic IMU 6DOF 11
Carte de clic IMU 6DOF 11
SKU: MIKROE-3869
Impossible de charger la disponibilité du service de retrait

Overview
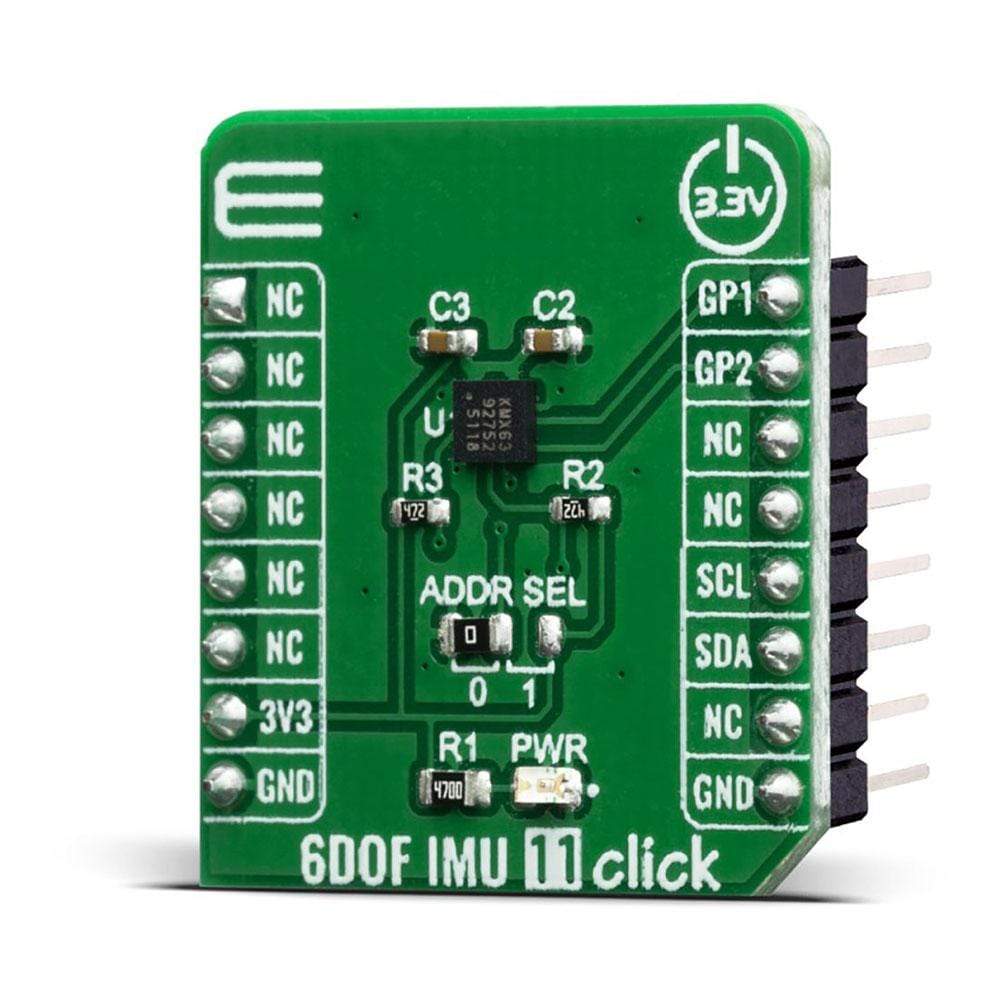
The 6DOF IMU 11 Click Board™ is based on the KMX63, a 6 Degrees-of-Freedom inertial sensor system on a single, silicon chip, which is designed to strike a balance between current consumption and noise performance with excellent bias stability over temperature. The KMX63 sensor consists of a tri-axial magnetometer plus a triaxial accelerometer coupled with an ASIC.
The 6DOF IMU 11 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Le 6DOF IMU 11 Click Board™ est basé sur le KMX63, un système de capteur inertiel à 6 degrés de liberté sur une seule puce en silicium, conçu pour trouver un équilibre entre la consommation de courant et les performances en matière de bruit avec une excellente stabilité de polarisation en fonction de la température. Le capteur KMX63 se compose d'un magnétomètre triaxial et d'un accéléromètre triaxial couplés à un ASIC.
Le Click Board™ 6DOF IMU 11 est pris en charge par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Ce Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3869
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018719396
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.