



Mikroelektronika d.o.o.
Planche à clic silencieuse
Planche à clic silencieuse
SKU: MIKROE-3714
Impossible de charger la disponibilité du service de retrait


Overview
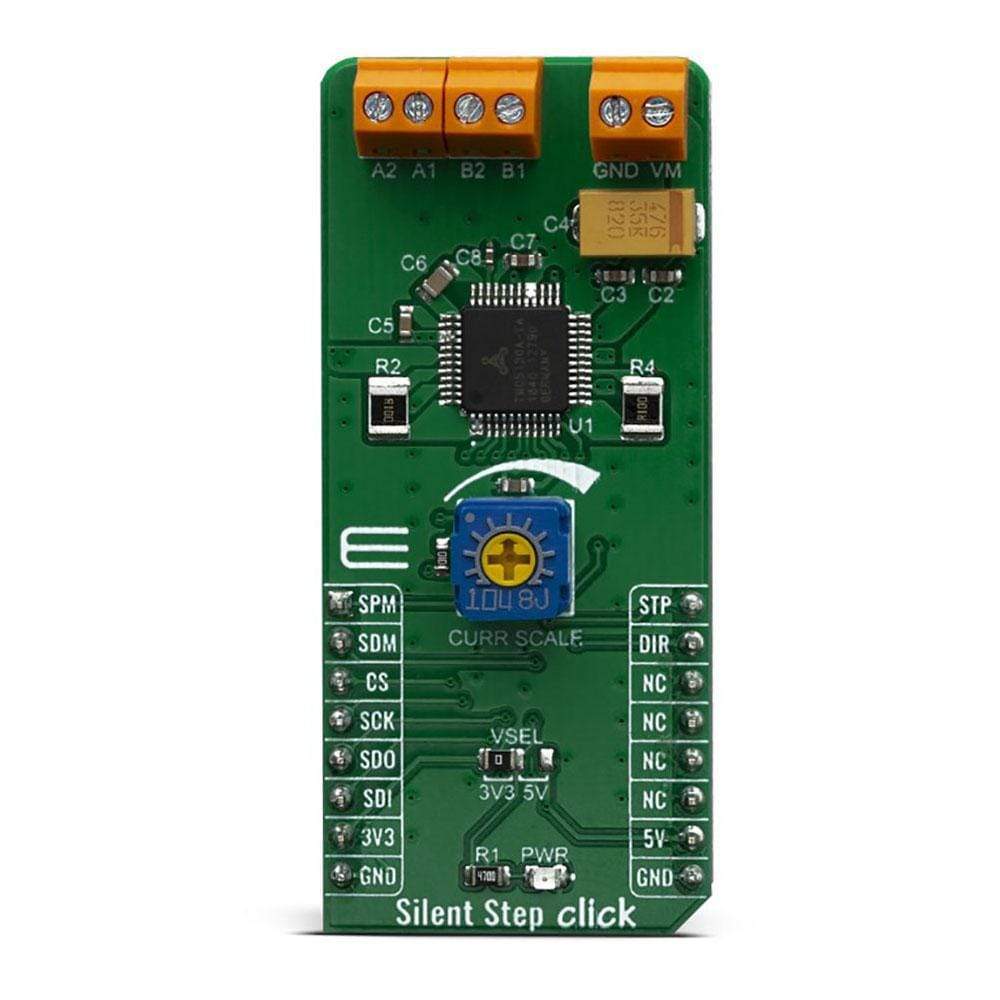
The Silent Step Click Board™ is the complete integrated bipolar step motor driver solution, rich with many features that allow extremely smooth and silent operation of the connected motor while being able to provide up to 2.5A peak motor current and withstand up to 46V supply voltage. The specialized TMC5130 IC driver from Trinamic Company far exceeds the capabilities of similar step motor drivers that are commonly used. Thereby, the Silent Step click is basically the “intelligence and power” between the main MCU, as a motion controller, and the two-phase stepper motor. The device achieves outstanding performance with a wide range of various step motors, thanks to several technologies featured, such as stallGuard2™, spreadCycle™, stealthChop™, microPlayer™ and many more.
The Silent Step Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Le Click Board Silent Step™ est la solution de pilote de moteur pas à pas bipolaire intégrée complète, riche de nombreuses fonctionnalités qui permettent un fonctionnement extrêmement fluide et silencieux du moteur connecté tout en étant capable de fournir jusqu'à 2,5 A de courant de crête du moteur et de supporter jusqu'à 46 V de tension d'alimentation. Le pilote IC spécialisé TMC5130 de Trinamic Company dépasse de loin les capacités des pilotes de moteur pas à pas similaires qui sont couramment utilisés. Ainsi, le clic Silent Step est fondamentalement « l'intelligence et la puissance » entre le MCU principal, en tant que contrôleur de mouvement, et le moteur pas à pas biphasé. L'appareil atteint des performances exceptionnelles avec une large gamme de moteurs pas à pas différents, grâce à plusieurs technologies présentées, telles que stallGuard2™, spreadCycle™, stealthChop™, microPlayer™ et bien d'autres.
La carte Click Board™ Silent Step est supportée par une bibliothèque compatible mikroSDK, qui comprend des fonctions qui simplifient le développement logiciel. Cette carte Click Board™ est un produit entièrement testé, prêt à être utilisé sur un système équipé du socket mikroBUS™.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3714
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018716722
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.