
Mikroelektronika d.o.o.
Tableau magnétique à clic linéaire
Tableau magnétique à clic linéaire
SKU: MIKROE-3274
Impossible de charger la disponibilité du service de retrait
Overview
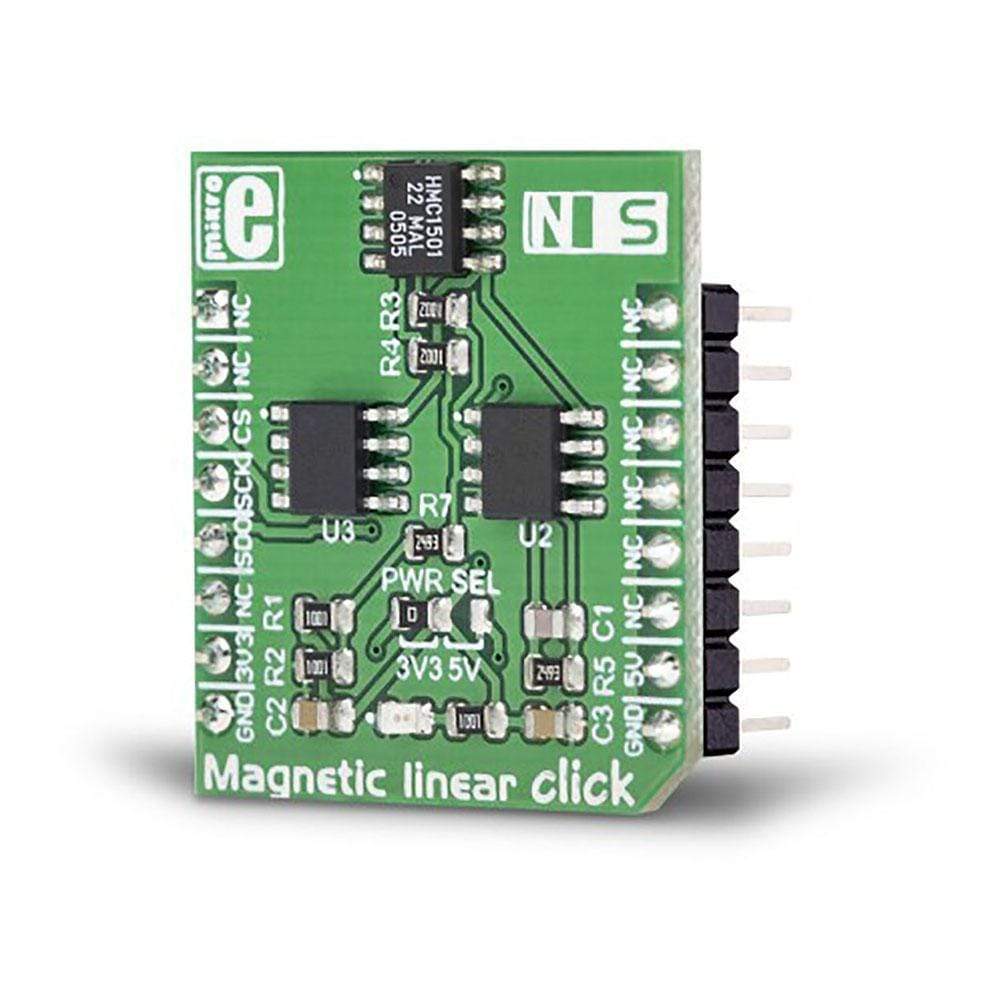
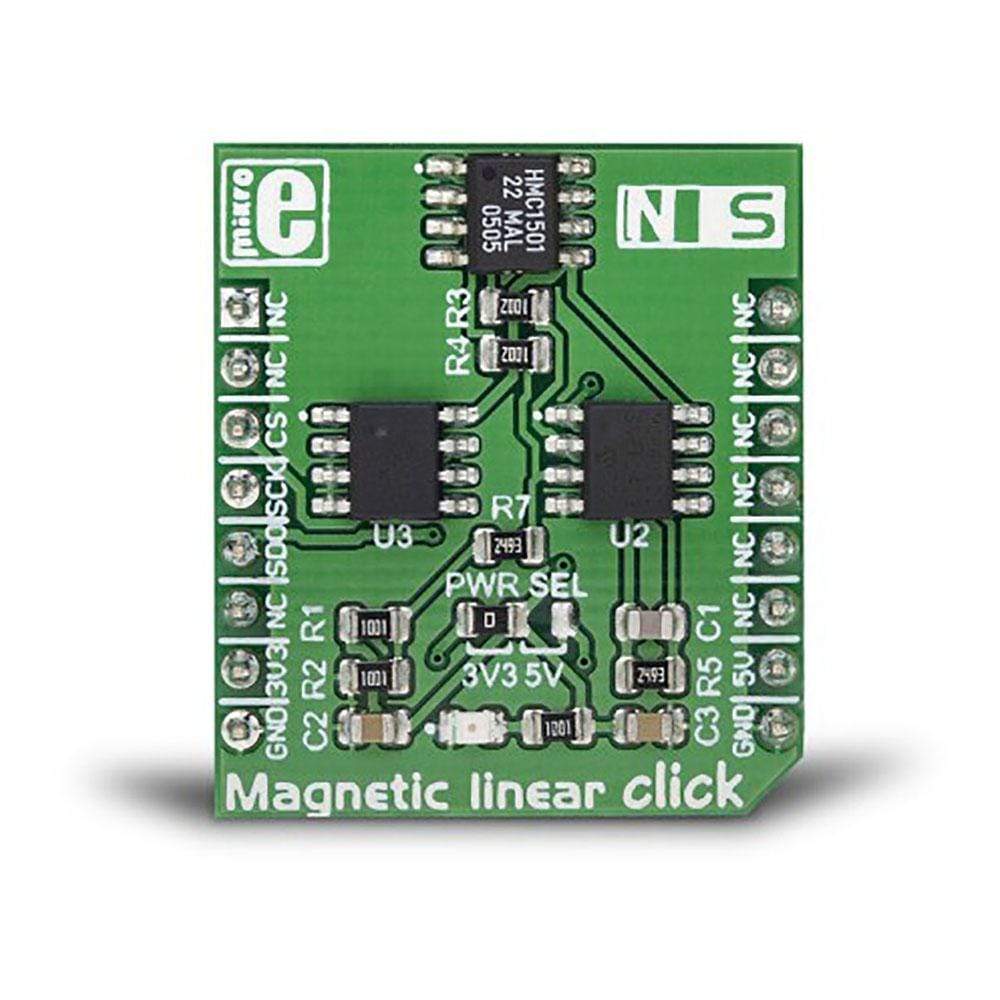
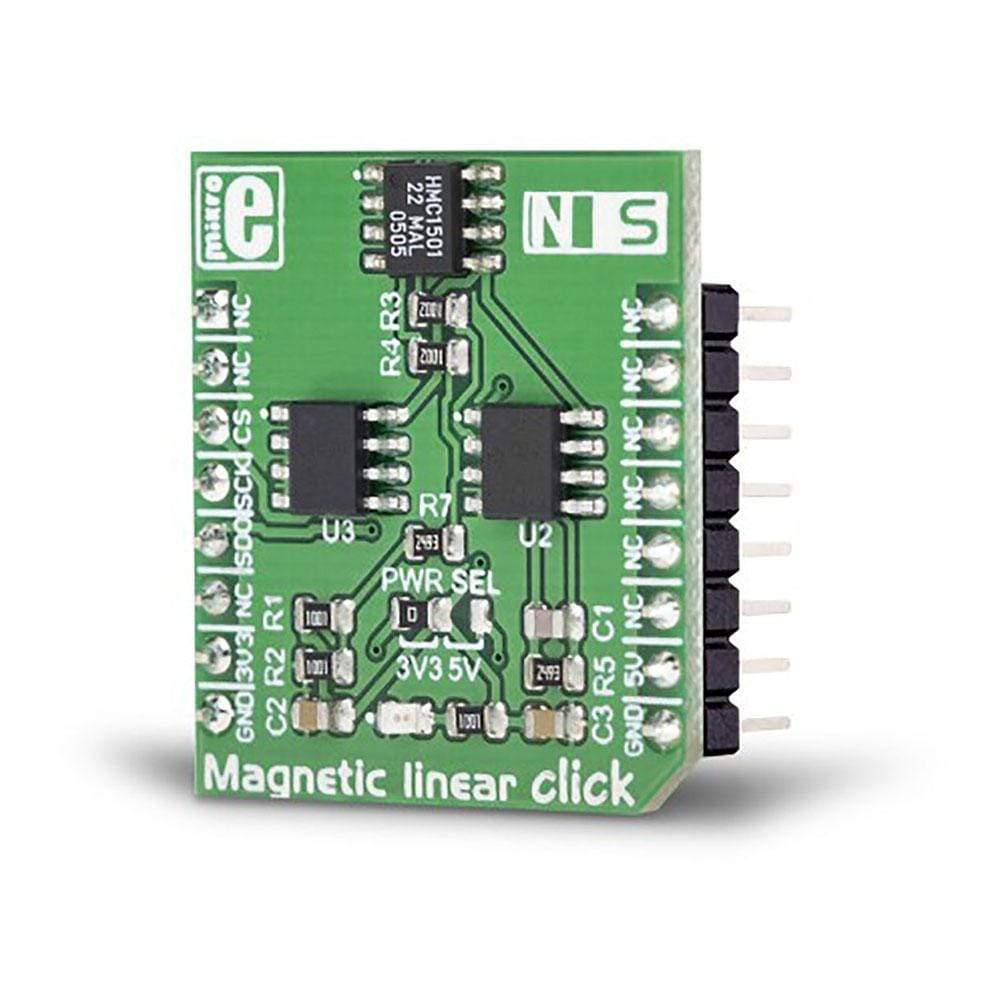
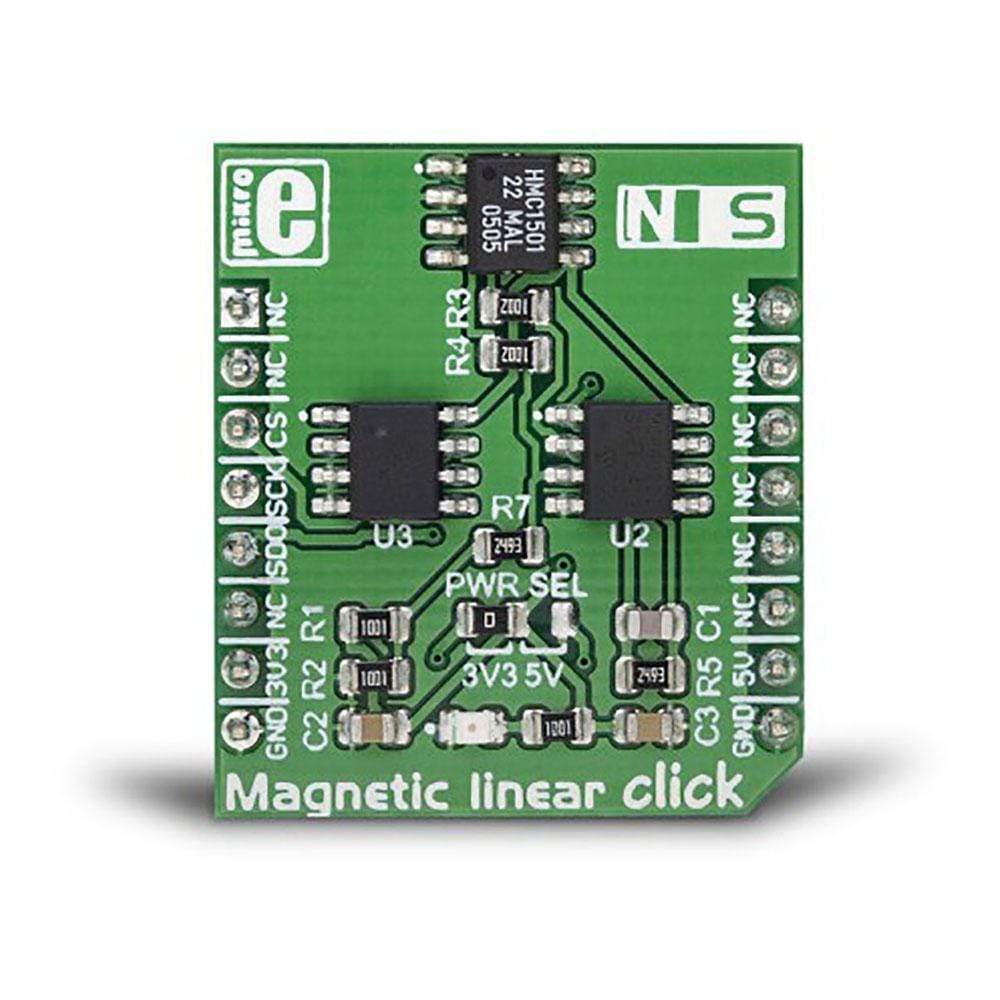
The Magnetic linear Click Board™ is a very accurate position sensing Click Board™ which utilizes the HMC1501, a magnetic field displacement sensor IC. This integrated sensor uses a single saturated-mode Wheatstone bridge which consists of four magneto-resistive elements. The precision of up to 0.07° in the angular range of ±45° can be easily achieved using the Magnetic linear Click Board™, making it far more accurate than the commonly used Hall-effect sensors.
Downloads
Le Click Board™ linéaire magnétique est un Click Board™ de détection de position très précis qui utilise le HMC1501, un circuit intégré de capteur de déplacement de champ magnétique. Ce capteur intégré utilise un seul pont de Wheatstone en mode saturé qui se compose de quatre éléments magnétorésistifs. La précision allant jusqu'à 0,07° dans la plage angulaire de ±45° peut être facilement obtenue à l'aide du Click Board™ linéaire magnétique, ce qui le rend bien plus précis que les capteurs à effet Hall couramment utilisés.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3274
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606018714025
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.