



Mikroelektronika d.o.o.
Carte Click ATA6570
Carte Click ATA6570
SKU: MIKROE-2900
Impossible de charger la disponibilité du service de retrait



Key Features
Overview
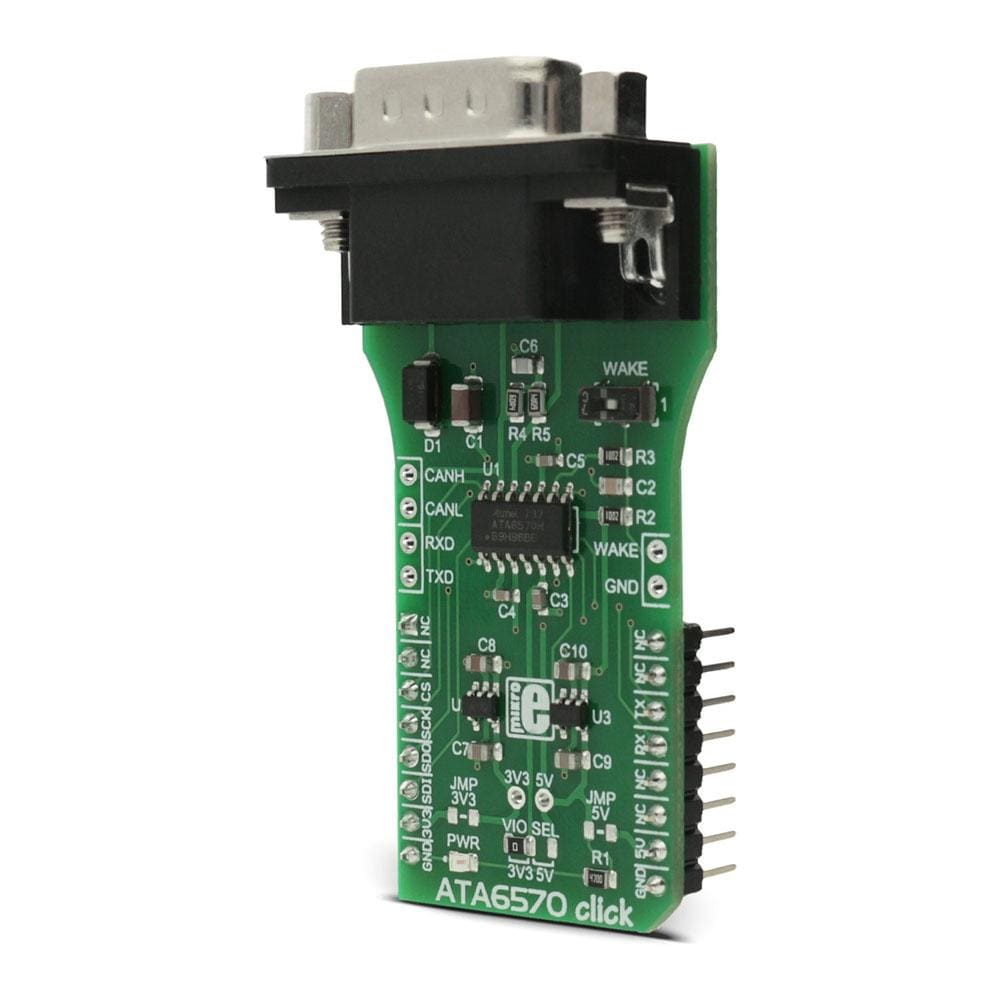
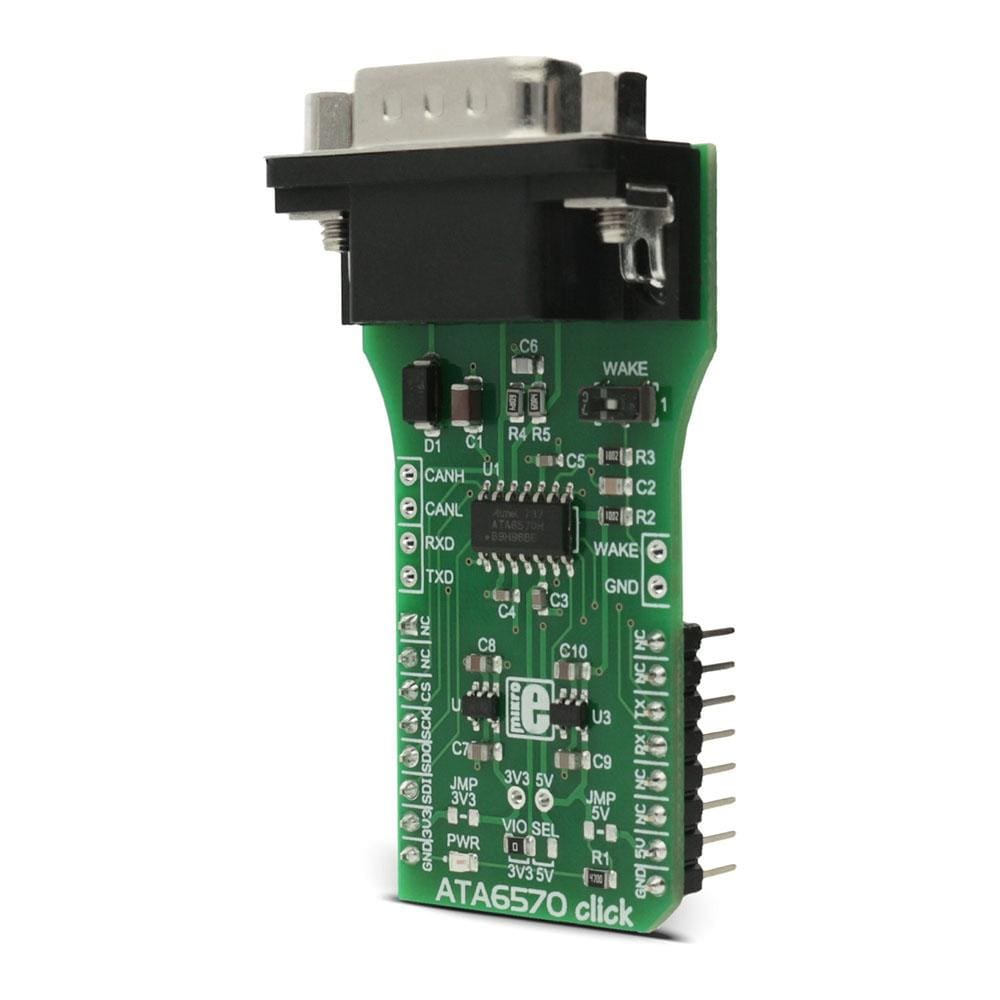
The ATA6570 Click Board™ is a CAN Partial Networking interface board. The click carries the ATA6570, a high-speed CAN transceiver that interfaces a Controller Area Network (CAN) protocol controller and the physical two-wire CAN Bus. This IC has some unique features that make it a perfect choice for any embedded CAN application.
It supports both CAN and CAN FD protocol types, partial networking, local and remote wake up, an SPI interface for internal registers configuration, and it features six operating modes as well as the under-voltage and overtemperature protection. The power consumption is taken to a minimum, as the ATA6570 can power down the entire system until a valid wake-up frame is received - even on a busy CAN bus. The car battery supply pin and the CAN bus pins are protected from various interferences and voltage instabilities, typically observed in automotive systems. The ATA6570 Click Board™ provides you with a robust and reliable CAN bus interface.
Downloads
La carte Click Board™ ATA6570 est une carte d'interface de mise en réseau partielle CAN. La carte Click embarque l'ATA6570, un émetteur-récepteur CAN à haut débit qui relie un contrôleur de protocole CAN (Controller Area Network) et le bus CAN physique à deux fils. Ce circuit intégré présente des caractéristiques uniques qui en font un choix parfait pour toute application CAN intégrée.
Il prend en charge les types de protocole CAN et CAN FD, la mise en réseau partielle, le réveil local et distant, une interface SPI pour la configuration des registres internes, et il dispose de six modes de fonctionnement ainsi que de la protection contre les sous-tensions et les surchauffes. La consommation d'énergie est réduite au minimum, car l'ATA6570 peut mettre hors tension l'ensemble du système jusqu'à ce qu'une trame de réveil valide soit reçue - même sur un bus CAN occupé. La broche d'alimentation de la batterie de voiture et les broches du bus CAN sont protégées contre diverses interférences et instabilités de tension, généralement observées dans les systèmes automobiles. La carte Click Board™ ATA6570 vous offre une interface de bus CAN robuste et fiable.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-2900
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.028 kg
|
| Other | |
EAN |
8606018712373
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.