


Mikroelektronika d.o.o.
Carte à clic pour moteur à courant continu 8
Carte à clic pour moteur à courant continu 8
SKU: MIKROE-2893
Impossible de charger la disponibilité du service de retrait

Overview
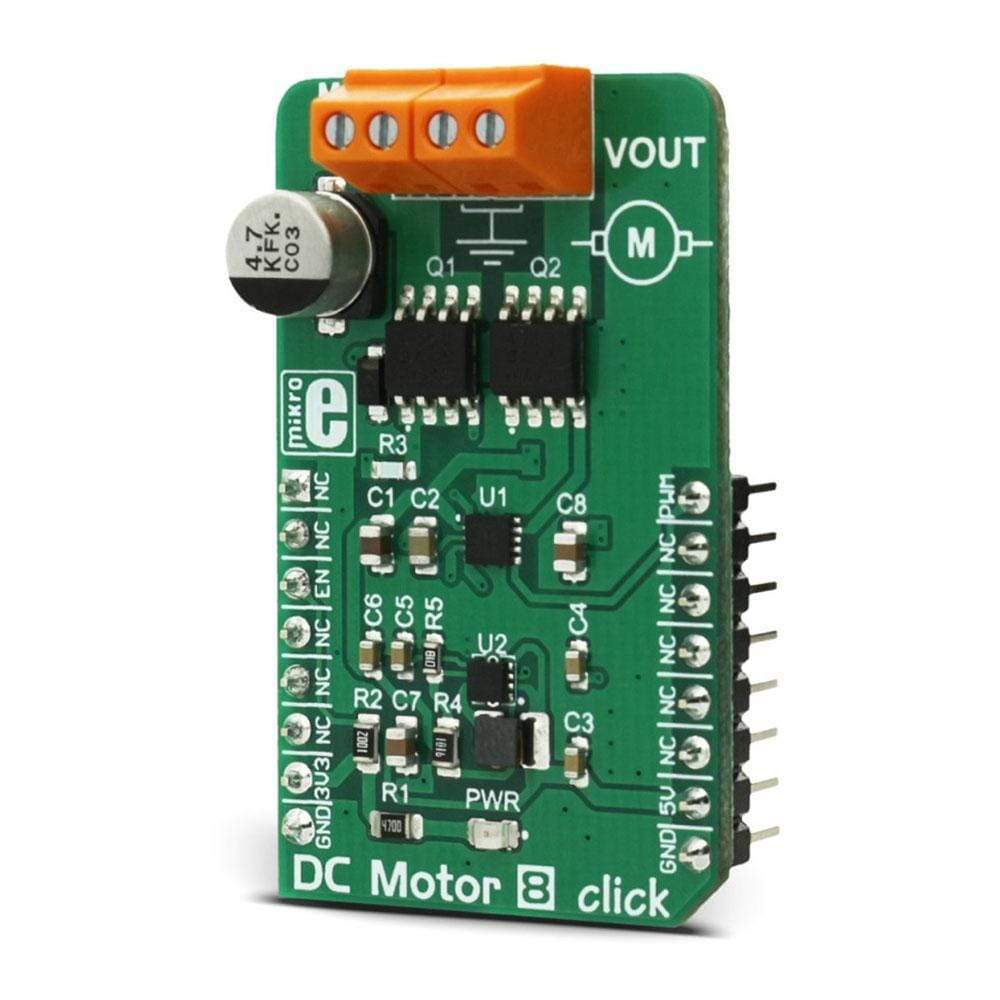
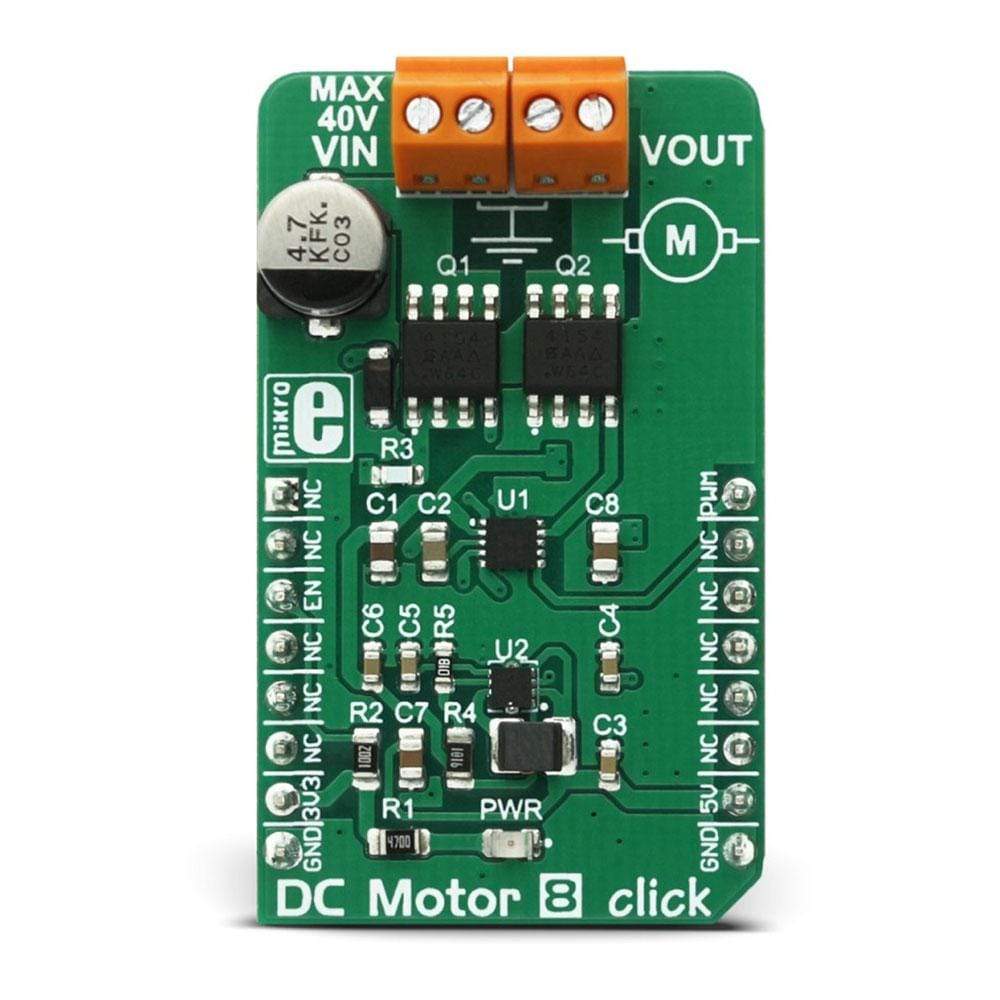
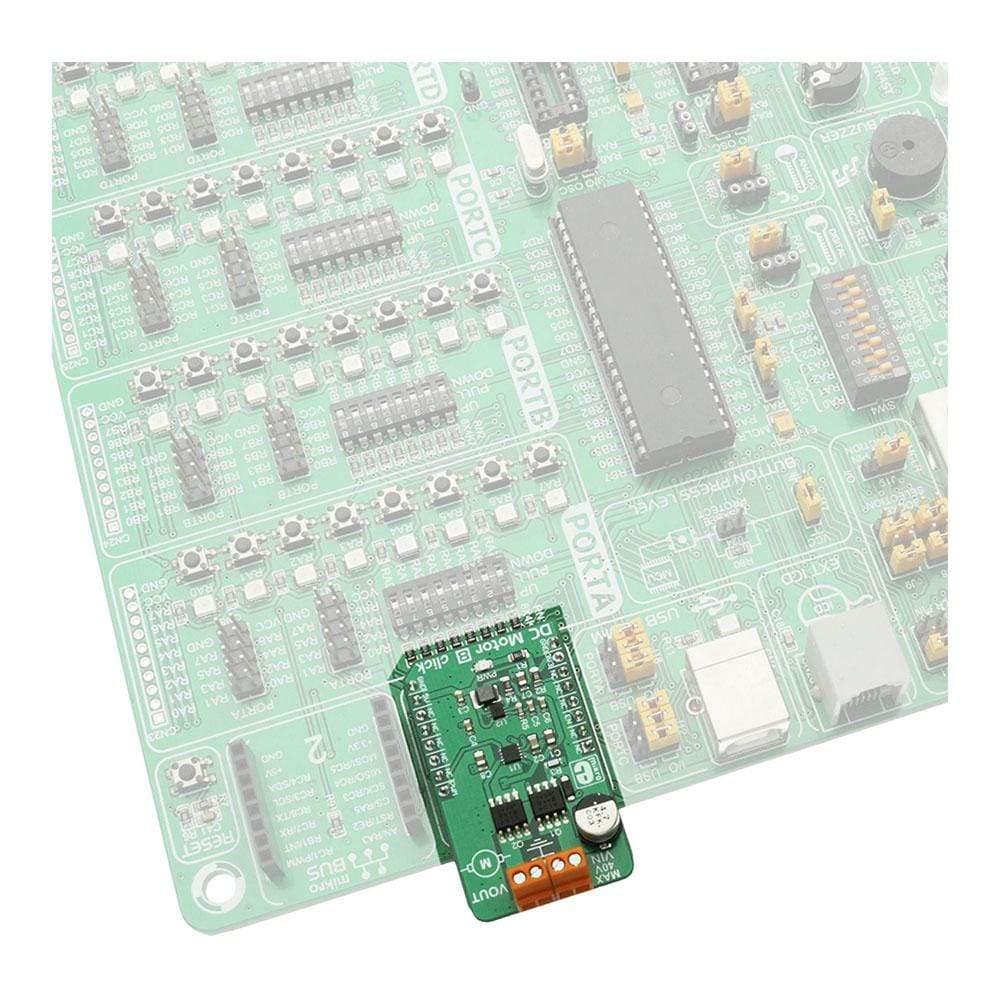
The DC Motor 8 Click Board™ is a DC motor driver. It can drive simple DC motors with brushes, providing them with a significant amount of current and voltage up to 40V. The Click Board™ has one control input, that uses the PWM signal from the host MCU. It uses the half-bridge topology to regulate the speed of the motor rotation, employs advanced dead-time circuitry that monitors the output stage, providing maximum switching efficiency and features an advanced technique to avoid shoot-through currents.
Downloads
Le DC Motor 8 Click Board™ est un pilote de moteur à courant continu. Il peut piloter des moteurs à courant continu simples avec balais, leur fournissant une quantité importante de courant et de tension jusqu'à 40 V. Le Click Board™ possède une entrée de commande, qui utilise le signal PWM du microcontrôleur hôte. Il utilise la topologie en demi-pont pour réguler la vitesse de rotation du moteur, utilise un circuit de temps mort avancé qui surveille l'étage de sortie, offrant une efficacité de commutation maximale et dispose d'une technique avancée pour éviter les courants de fuite.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-2893
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.025 kg
|
| Other | |
EAN |
8606018712328
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.