



Mikroelektronika d.o.o.
Carte Click sans balais
Carte Click sans balais
SKU: MIKROE-2441
Prix habituel
€40,95 EUR
hors taxes
Prix habituel
Prix promotionnel
Prix unitaire
par
€40,95 EUR
hors taxes
Frais d'expédition calculés à l'étape de paiement.
If no stock shown above, check availability
Impossible de charger la disponibilité du service de retrait
Overview
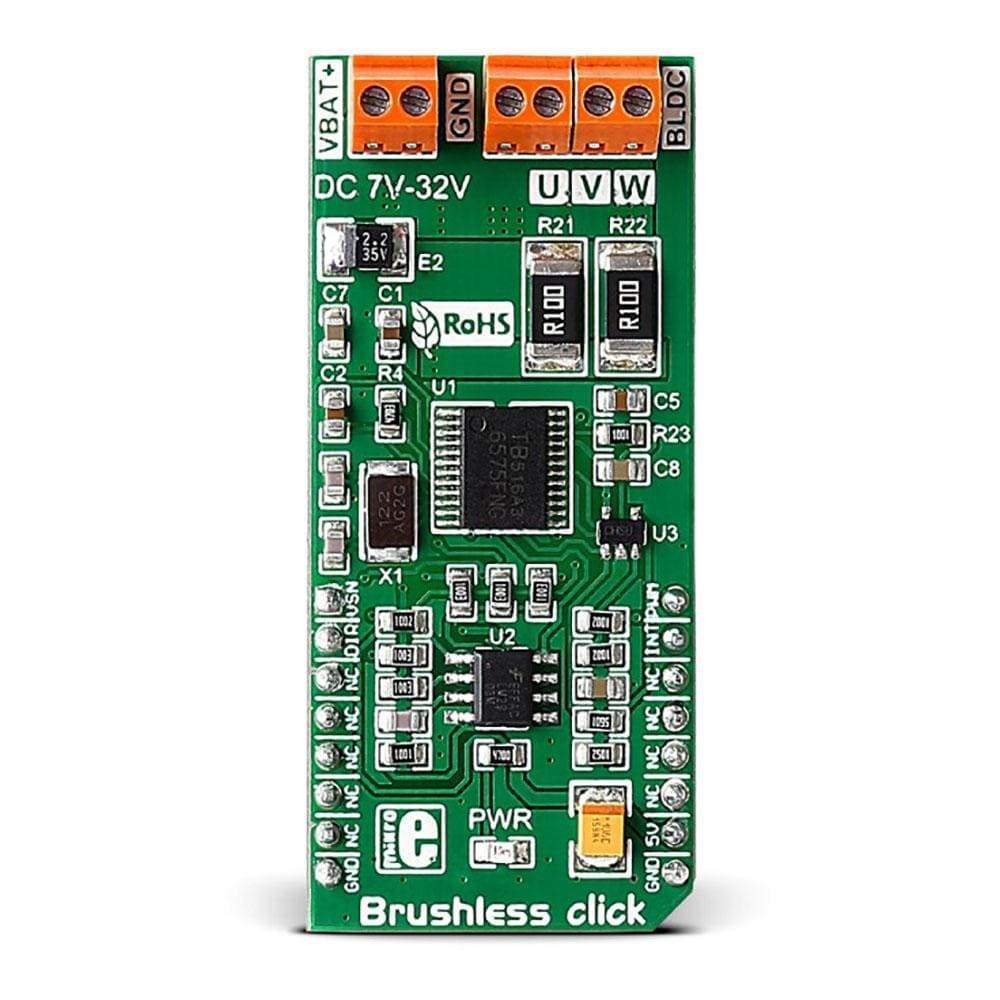
The Brushless Click Board™ carries Toshiba's TB6575FNG IC for driving 3-phase full-wave Brushless DC motors ' which are ideal for powering flying drones.
Downloads
La carte Brushless Click Board™ intègre le circuit intégré TB6575FNG de Toshiba pour piloter des moteurs à courant continu sans balais triphasés à onde complète, idéaux pour alimenter des drones volants.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-2441
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606015079271
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.