


Mikroelektronika d.o.o.
Tableau à clic GPS
Tableau à clic GPS
SKU: MIKROE-1032
Impossible de charger la disponibilité du service de retrait


Overview
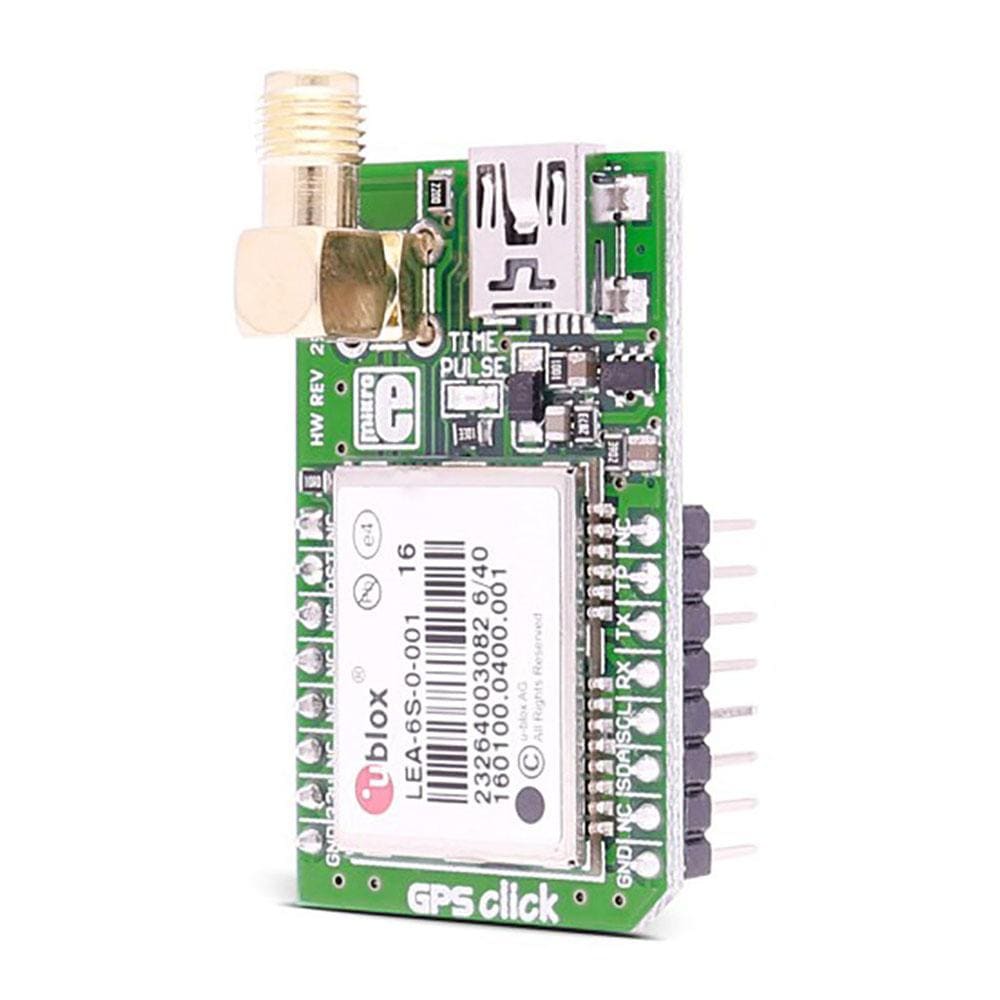
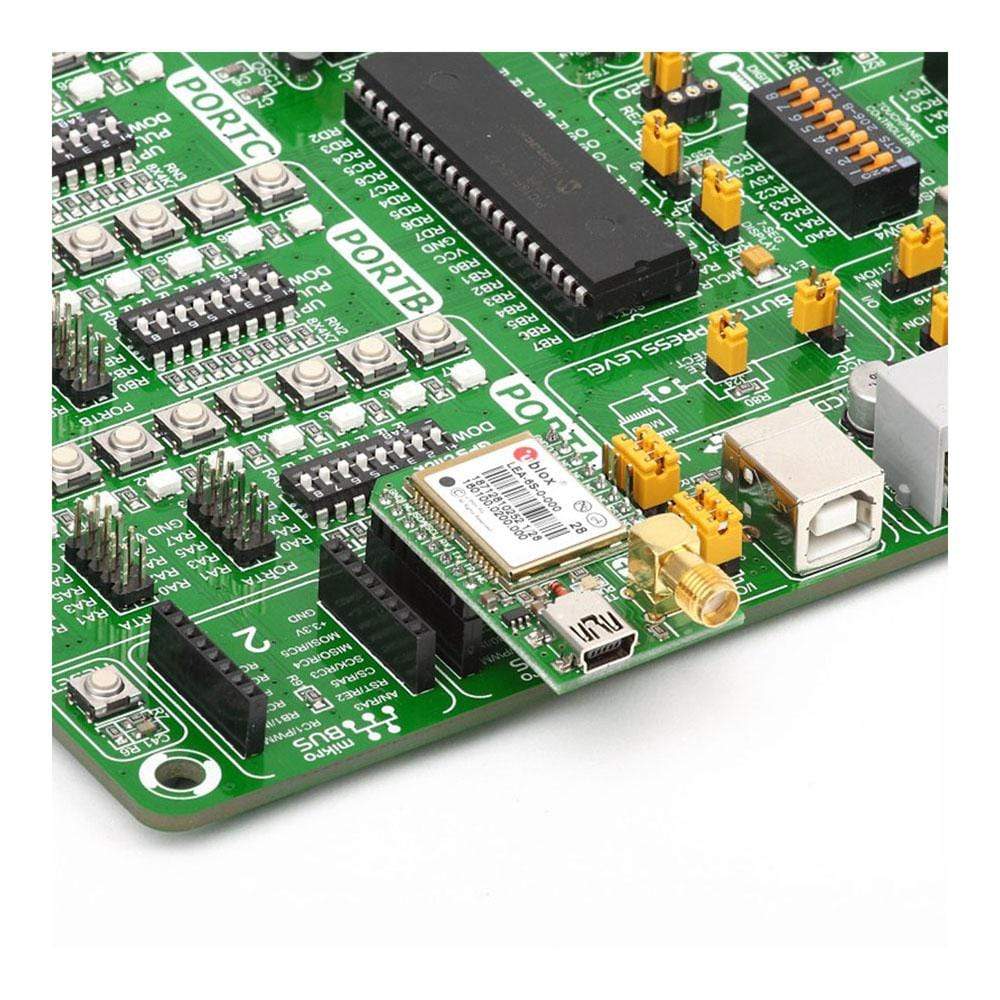
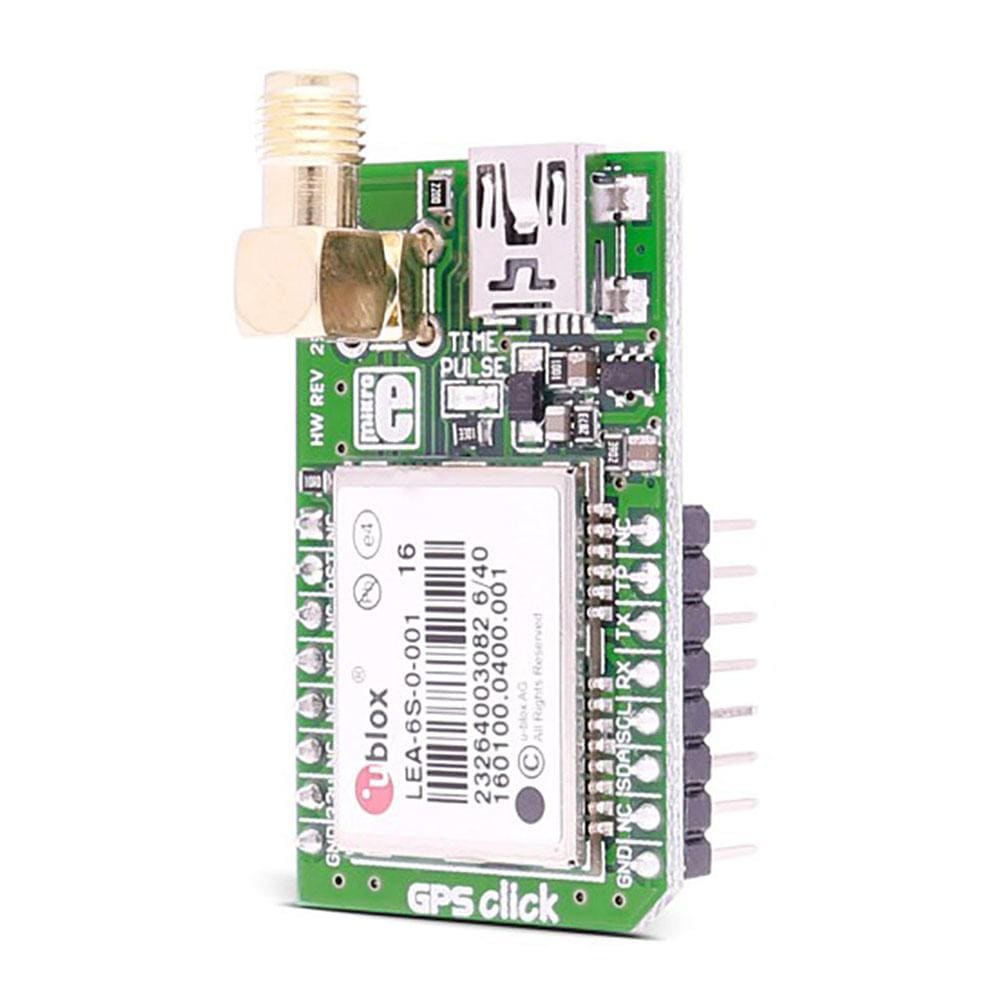
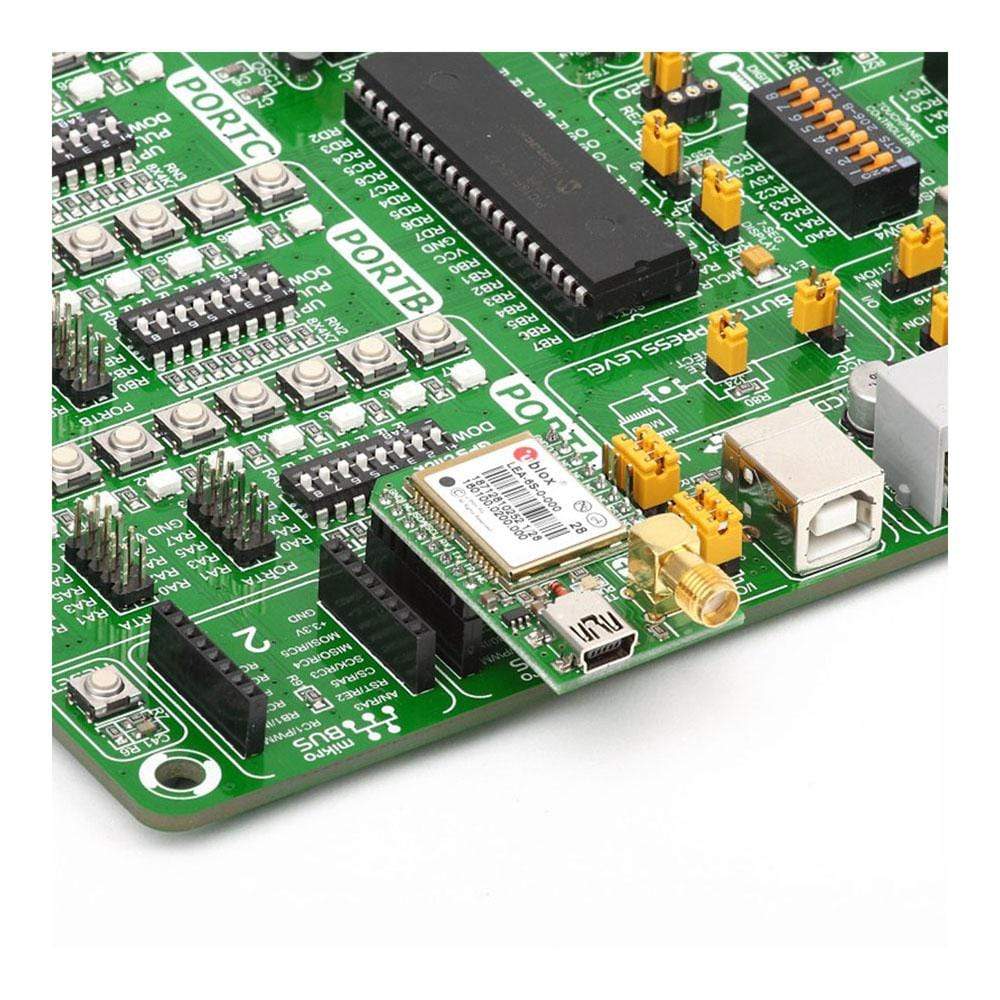
The GPS Click Board™ is a compact solution for adding GPS functionality to your device. It carries the u-blox LEA-6S high-performance position engine.
The GPS Click Board™ is designed to run on a 3.3V power supply and communicates with the target MCU through UART or I2C interface.
Data can also be acquired through a PC application using the USB connection.
Downloads
Le GPS Click Board™ est une solution compacte permettant d'ajouter des fonctionnalités GPS à votre appareil. Il est équipé du moteur de positionnement hautes performances u-blox LEA-6S.
Le GPS Click Board™ est conçu pour fonctionner sur une alimentation 3,3 V et communique avec le MCU cible via une interface UART ou I2C.
Les données peuvent également être acquises via une application PC utilisant la connexion USB.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-1032
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.034 kg
|
| Other | |
EAN |
8606015073637
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.