



Mikroelektronika d.o.o.
Carte à clic CAN FD
Carte à clic CAN FD
SKU: MIKROE-3933
Impossible de charger la disponibilité du service de retrait



Overview
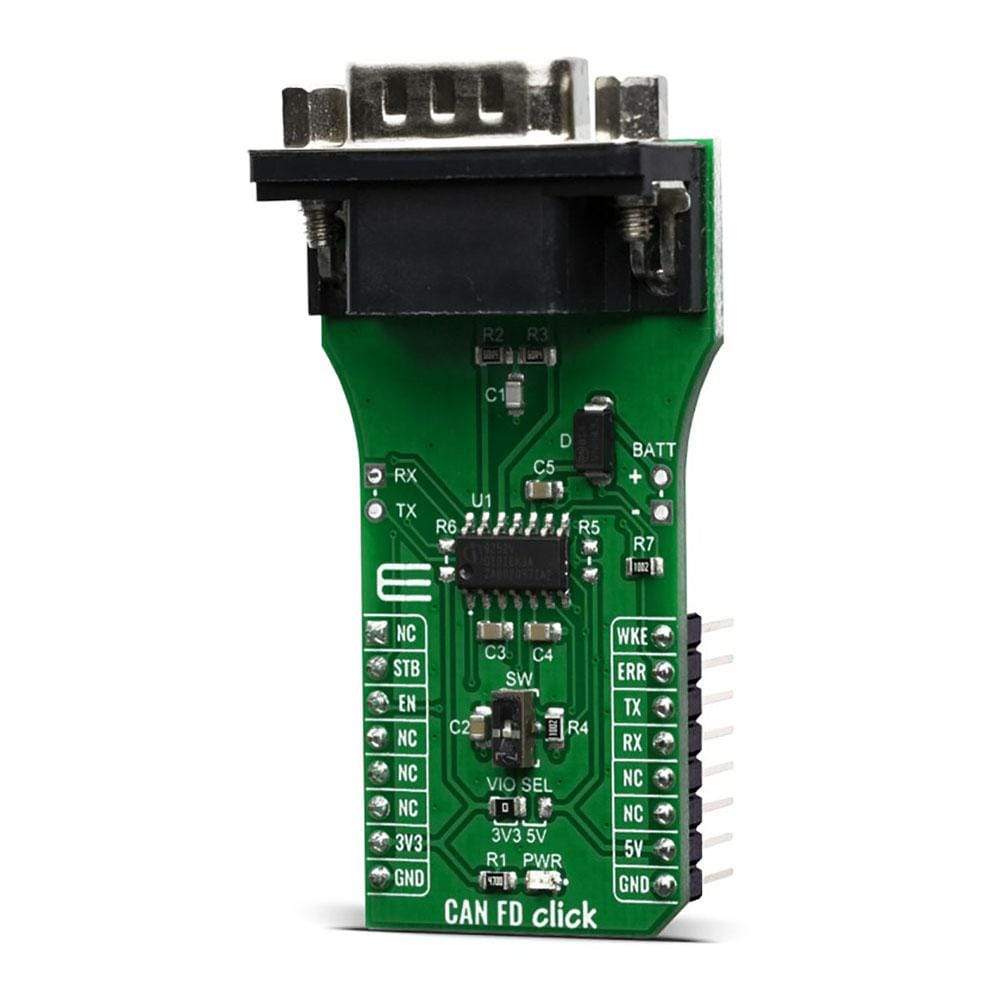
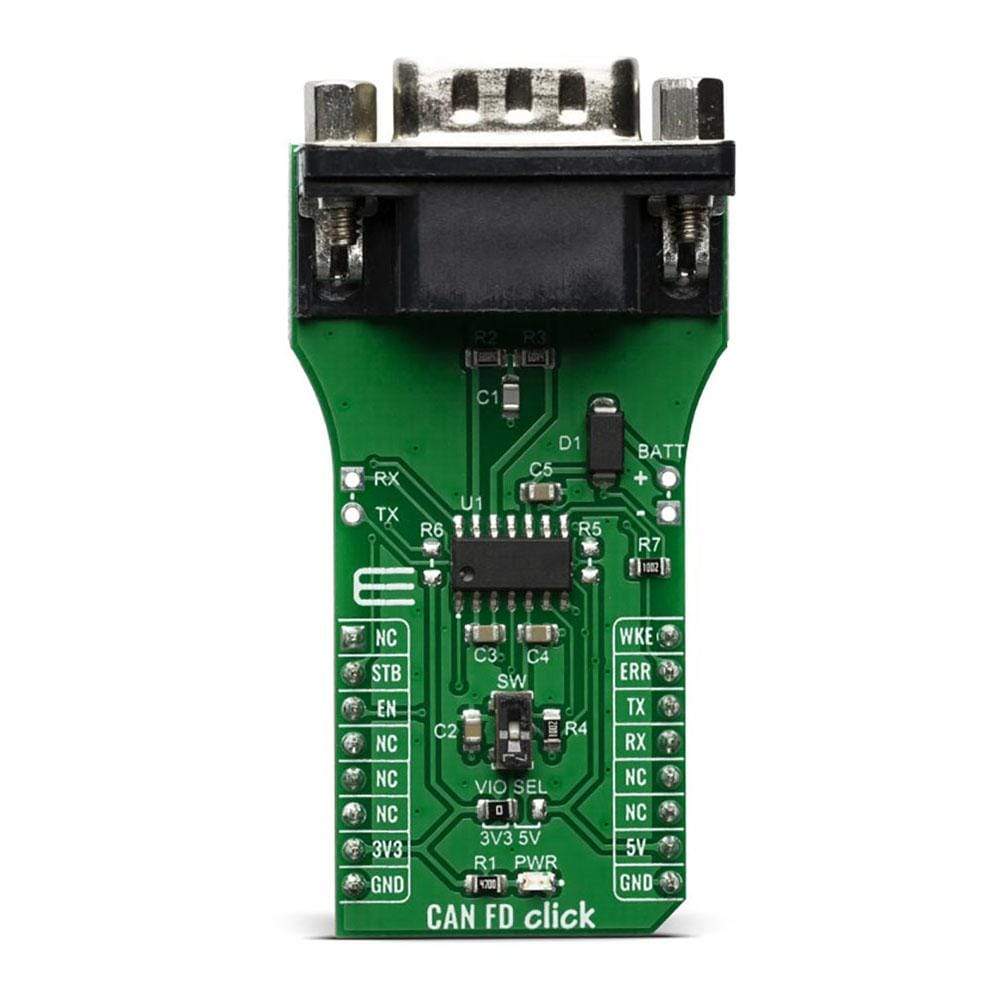
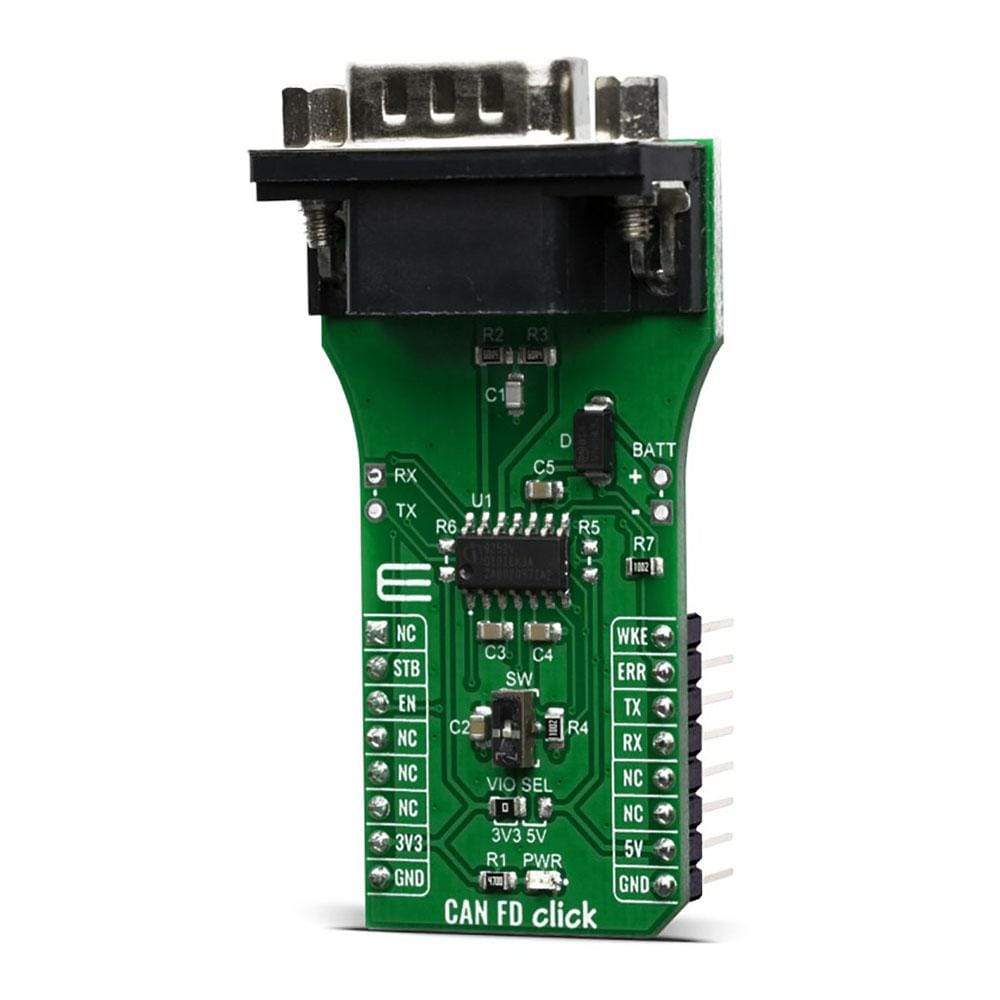
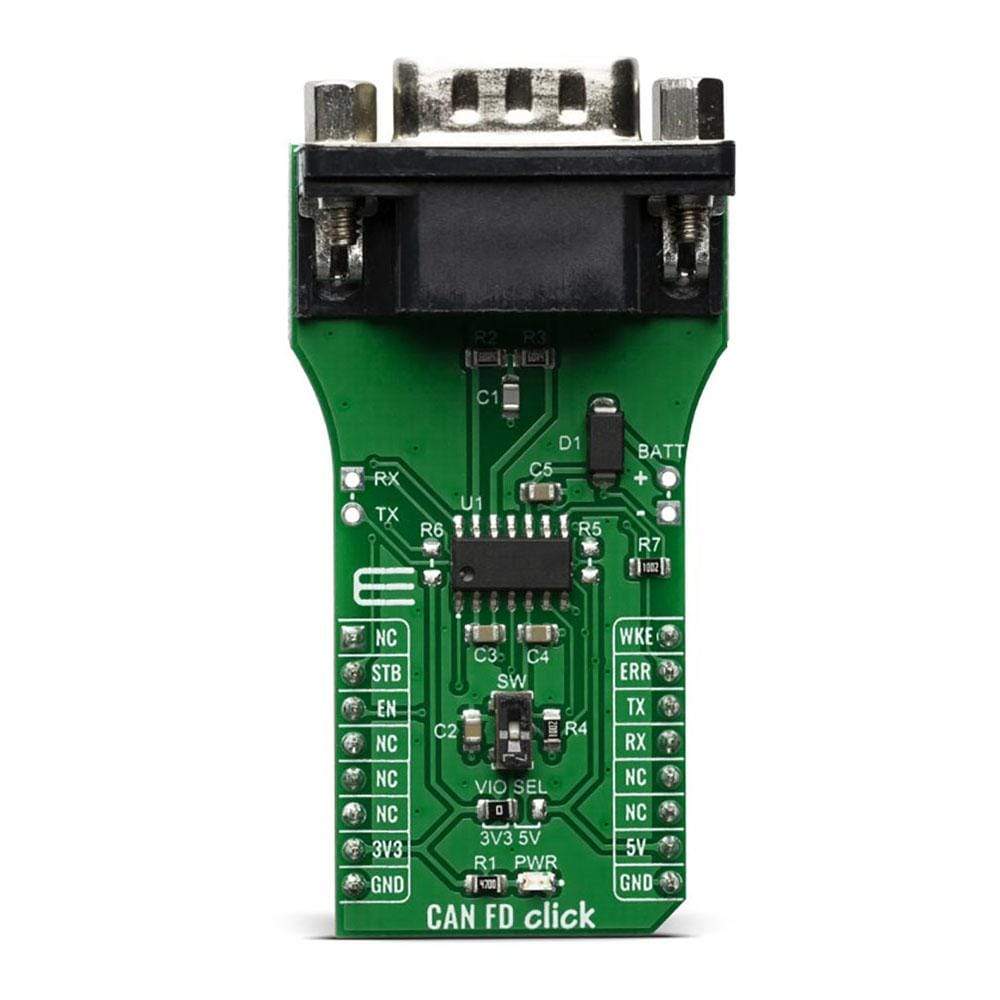
The CAN FD Click Board™ is an add-on board based on TLE9252V CAN network transceiver, designed for HS CAN network up to 5 Mbit/s in automotive and industrial applications. As an interface between the physical bus layer and the CAN protocol controller, the TLE9252V drives the signals to the bus and protects the microcontroller against interference generated within the network.
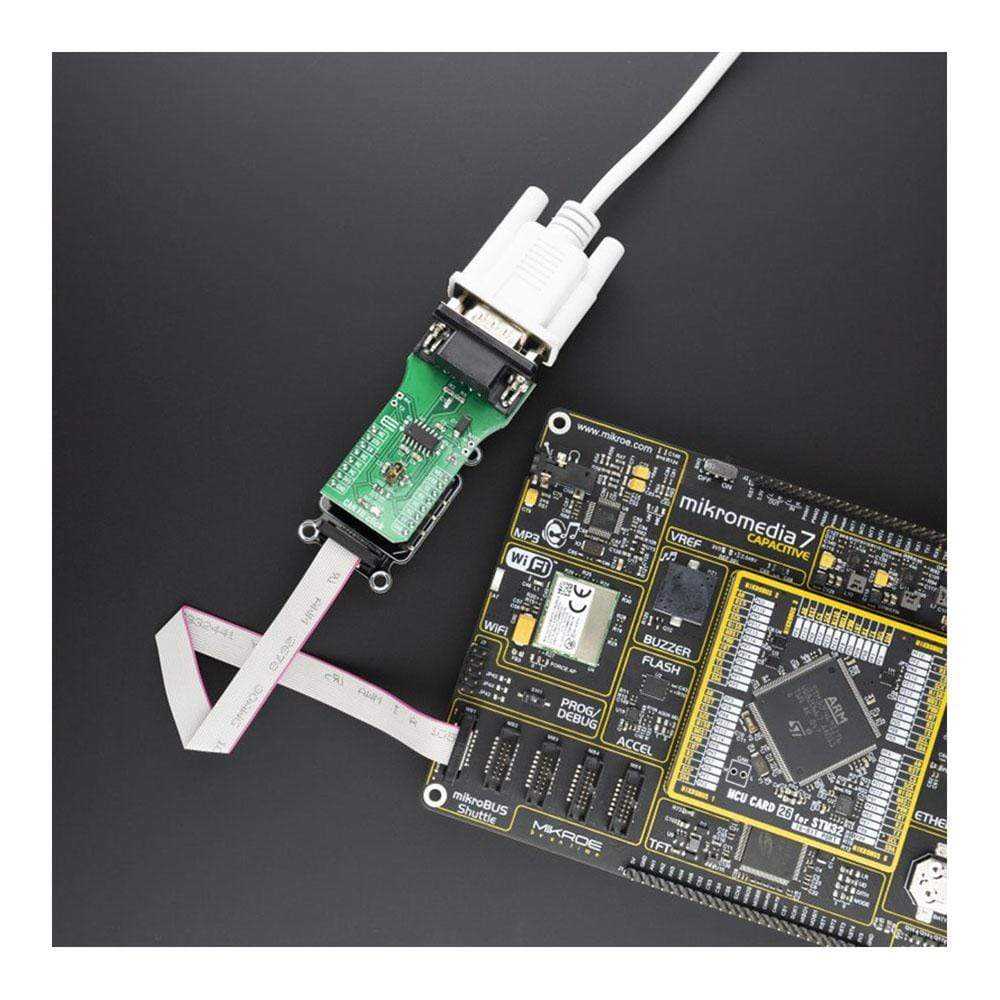
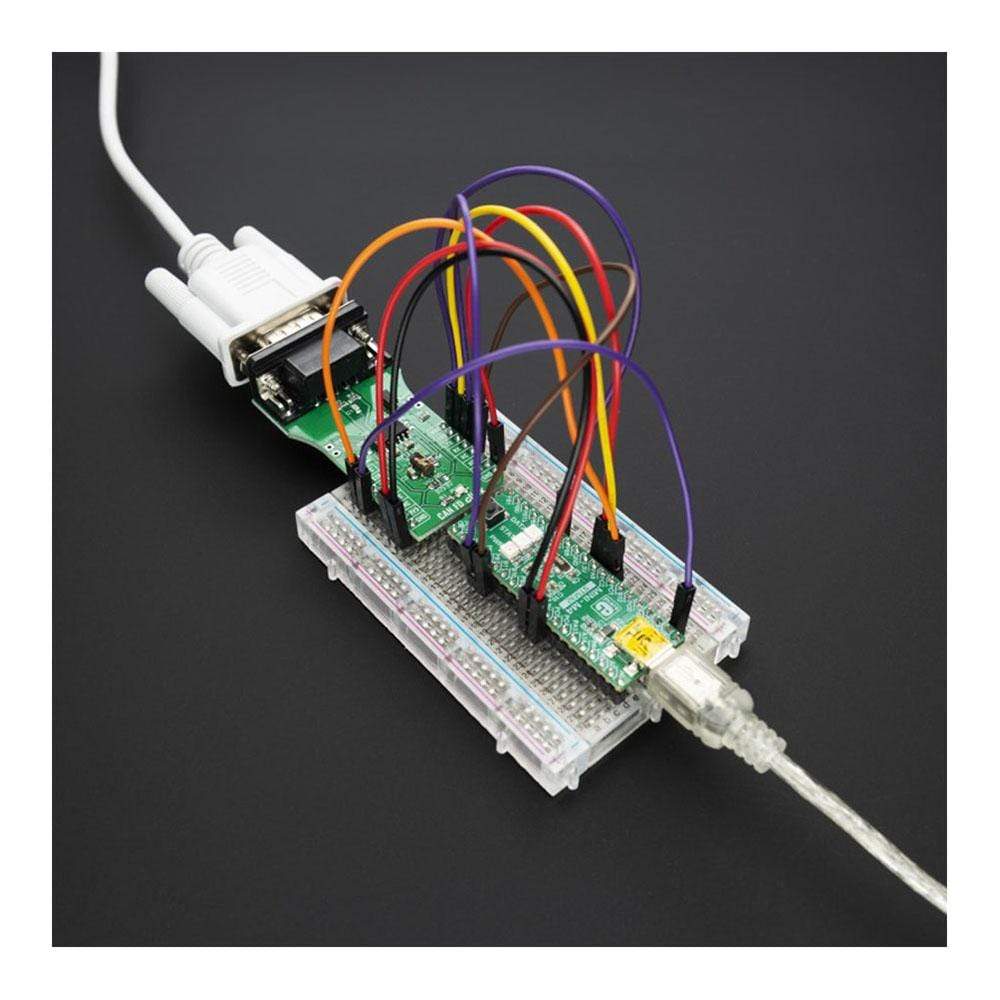
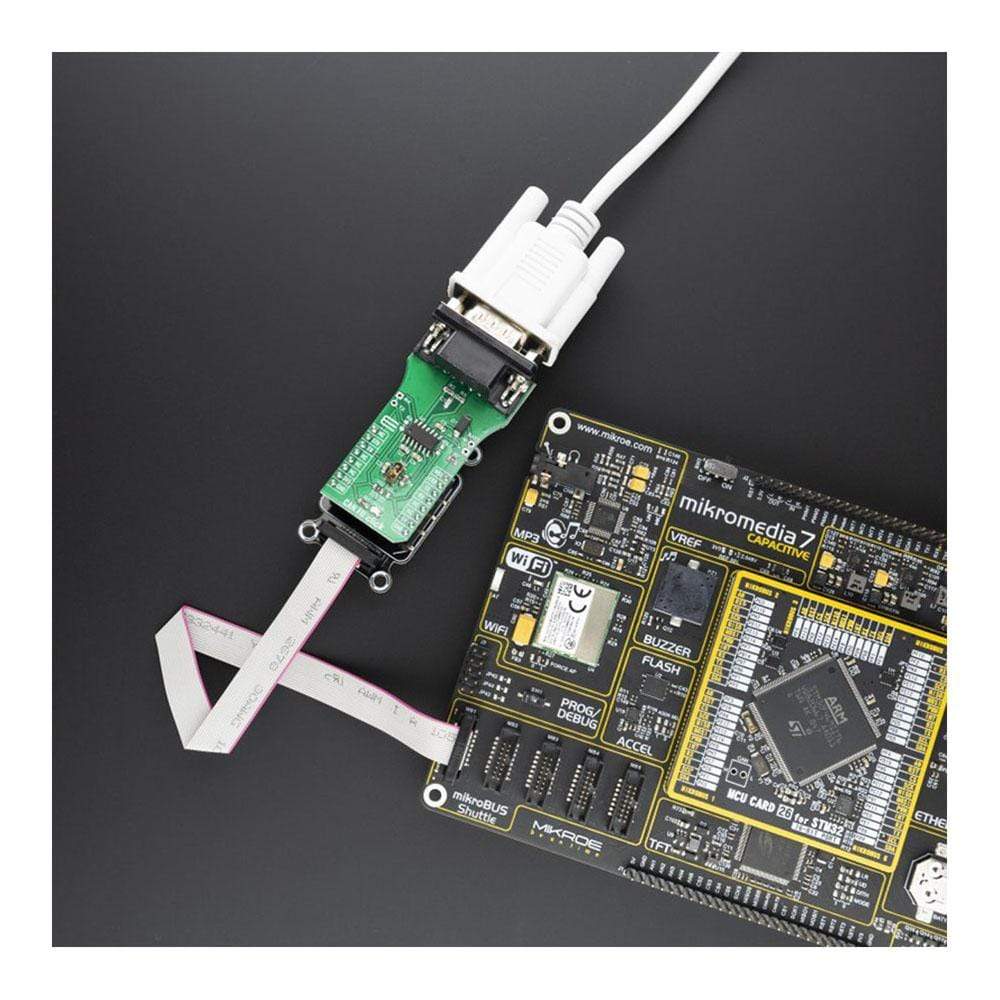
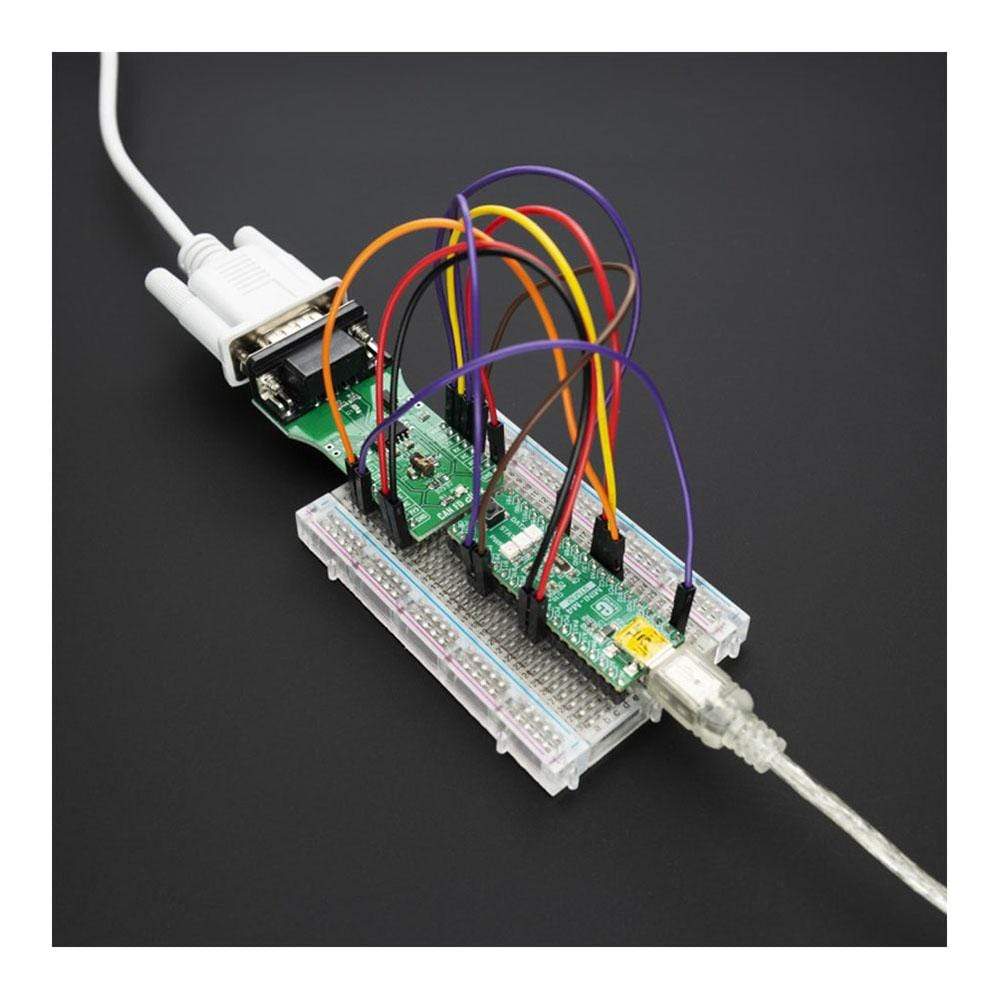
Given all the features its components offer, the CAN FD Click Board™ is best used for for infotainment applications, cluster modules, radar applications and HVAC.
Downloads
La carte CAN FD Click Board™ est une carte complémentaire basée sur l'émetteur-récepteur réseau CAN TLE9252V, conçue pour les réseaux CAN HS jusqu'à 5 Mbit/s dans les applications automobiles et industrielles. En tant qu'interface entre la couche de bus physique et le contrôleur de protocole CAN, le TLE9252V transmet les signaux au bus et protège le microcontrôleur contre les interférences générées au sein du réseau.
Compte tenu de toutes les fonctionnalités offertes par ses composants, le CAN FD Click Board™ est particulièrement adapté aux applications d'infodivertissement, aux modules de cluster, aux applications radar et au CVC.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3933
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.03 kg
|
| Other | |
EAN |
8606018718931
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.