



Mikroelektronika d.o.o.
Carte Brushless 5 Click
Carte Brushless 5 Click
SKU: MIKROE-3032
Impossible de charger la disponibilité du service de retrait



Overview
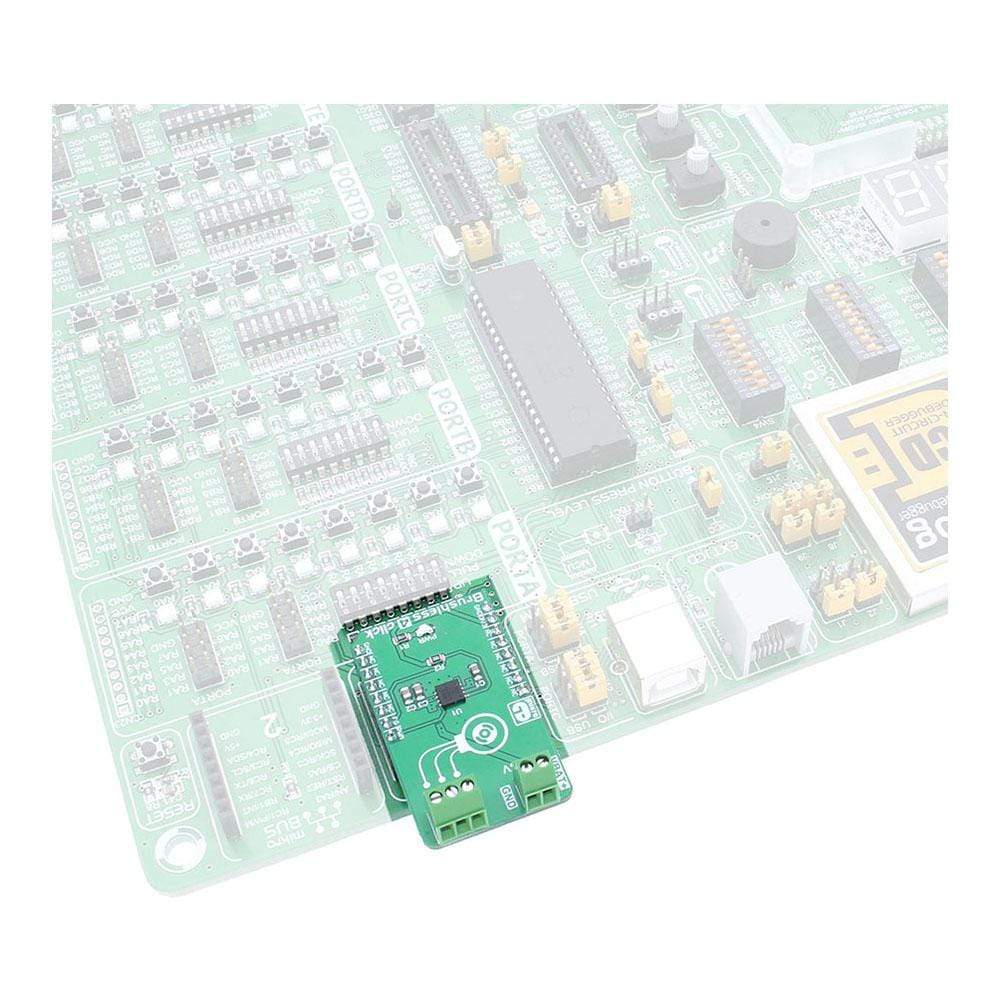
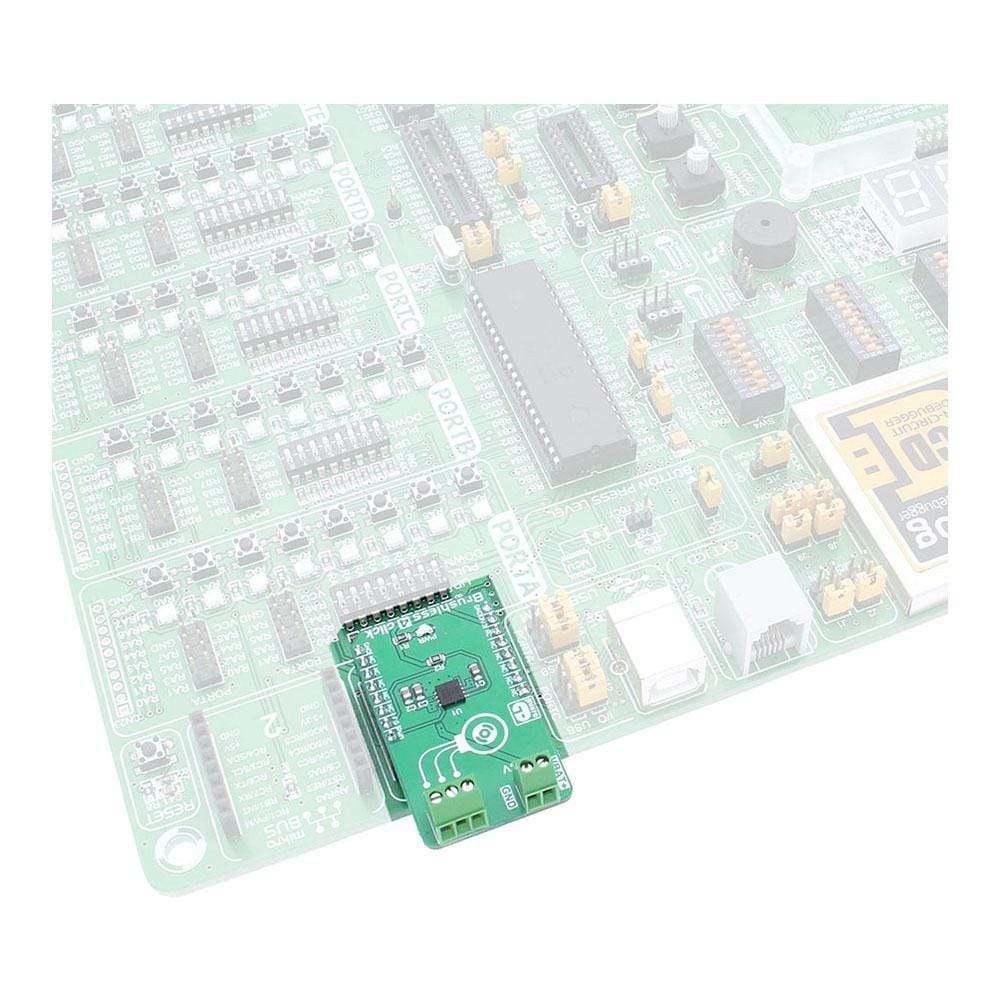
The Brushless 5 Click Board™ is a 3 phase sensorless BLDC motor controller, with a soft-switching feature for reduced motor noise and EMI, and precise BEMF motor sensing, which eliminates the need for Hall-sensors in motor applications. It can drive 5V-16V motors with up to 500 mA current. The motor driver allows speed control via the PWM signal from the host MCU. It also features an output pin for reading the speed of the motor. Delayed phase commutation ensures a reliable motor start, while the Lock Detect function prevents damage and overheating.
Downloads
Le Brushless 5 Click Board™ est un contrôleur de moteur BLDC triphasé sans capteur, doté d'une fonction de commutation douce pour réduire le bruit du moteur et les EMI, et d'une détection précise du moteur BEMF, ce qui élimine le besoin de capteurs à effet Hall dans les applications de moteur. Il peut piloter des moteurs 5 V-16 V avec un courant allant jusqu'à 500 mA. Le pilote de moteur permet le contrôle de la vitesse via le signal PWM du microcontrôleur hôte. Il dispose également d'une broche de sortie pour lire la vitesse du moteur. La commutation de phase retardée assure un démarrage fiable du moteur, tandis que la fonction de détection de verrouillage empêche les dommages et la surchauffe.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3032
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606018713028
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.