
Mikroelektronika d.o.o.
MPU 9DOF Click Board™
MPU 9DOF Click Board™
SKU: MIKROE-1719
Couldn't load pickup availability

Overview
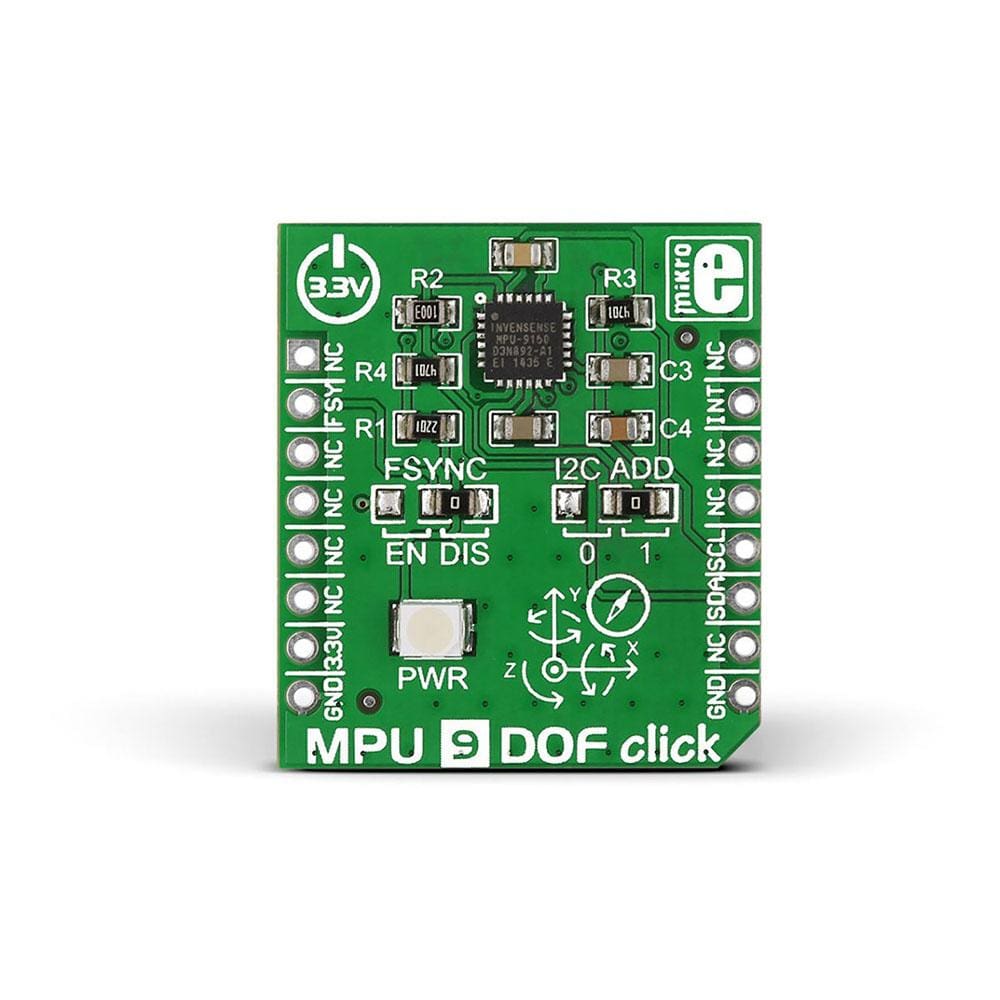
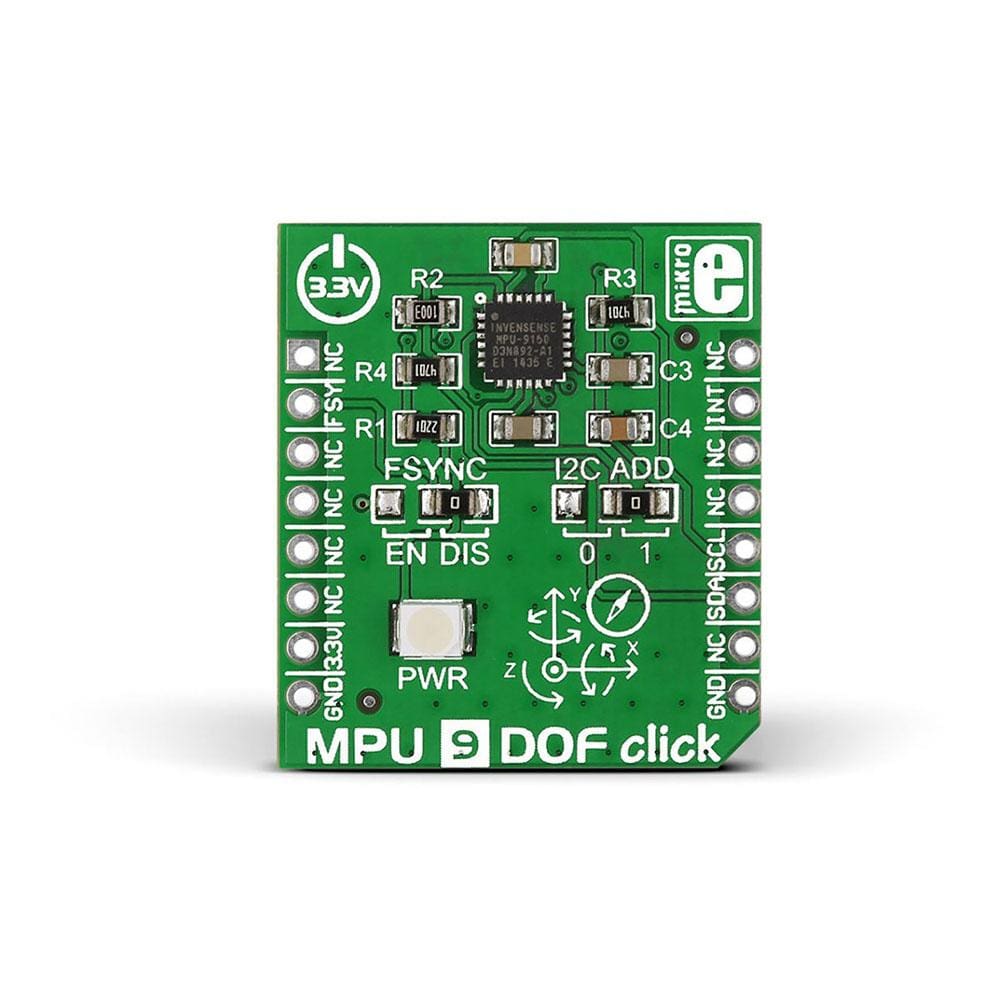
The MPU 9DOF Click Board™ from MikroE is a measurement add-on board that includes the MPU-9150 motion tracking MikroBUS module.
The Click Board™ includes two devices: a MPU-6050 3-Axios Accelerometer and 3-Axis Gyroscope and an AK8975 3-Axis Compass.
Downloads
The MPU 9DOF Click Board™ carries the MPU–9250 System in Package, which is the world's first 9-axis Motion Tracking device. MPU–9250 comprises two chips. One is the MPU–6050 that contains a 3-axis accelerometer, a 3-axis gyroscope, and a DMP (digital motion processor); the other is AK8975, a 3-axis digital compass. It is designed for the low power, low cost, and high-performance requirements of consumer electronics equipment and wearable sensors. The ability to track motion in free space also makes the MPU 9DOF Click Board™ a suitable sensor for RC vehicles (e.g. quadcopters) and camera stabilization systems.
Specifications
| Type | Acceleration, Gyroscope, Compass |
| Applications | Cost-effective 9-axis motion tracking for quadcopters, wearables, camera stabilization systems, game controllers and other devices |
| On-board modules | MPU–9150 comprises two chips. One is the MPU–6050 that contains a 3-axis accelerometer, a 3-axis gyroscope, and a DMP (digital motion processor); the other is AK8975, a 3-axis digital compass |
| Key Features | 3-axis accelerometer, 3-axis gyroscope, 3-axis compass |
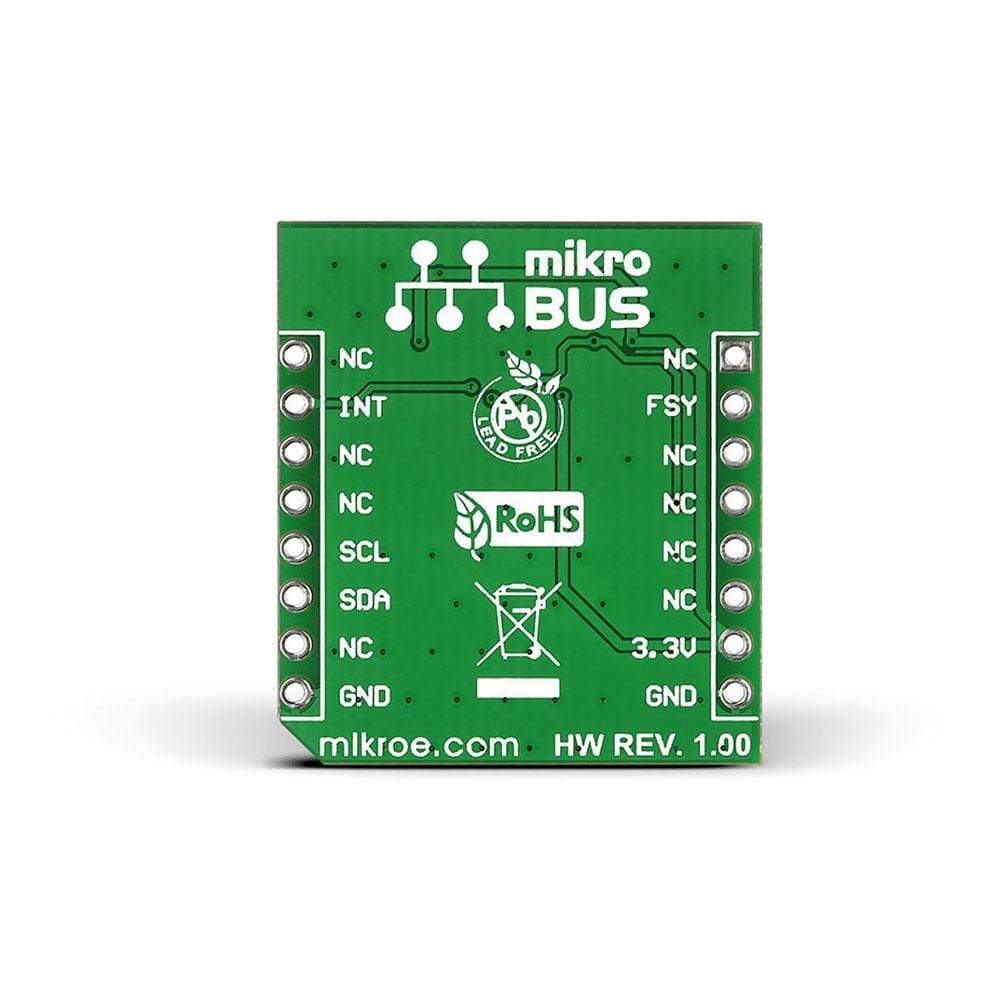
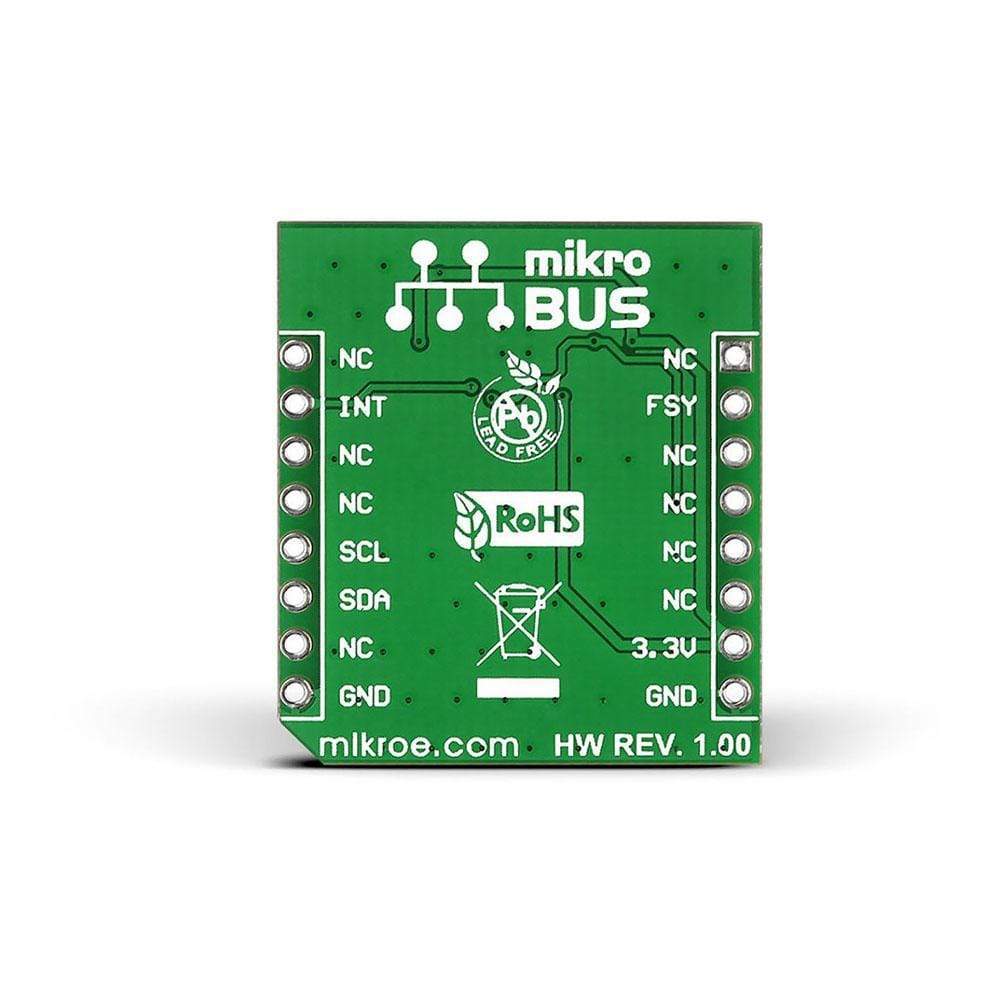
| Interface | GPIO,I2C |
| Compatibility | mikroBUS |
| Click board size | S (28.6 x 25.4 mm) |
| Input Voltage | 3.3V |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-1719
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.03 kg
|
| Other | |
EAN |
8606018714193
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.