


Mikroelektronika d.o.o.
Brushless 20 Click Board™
Brushless 20 Click Board™
SKU: MIKROE-5294
Couldn't load pickup availability


Key Features
Overview
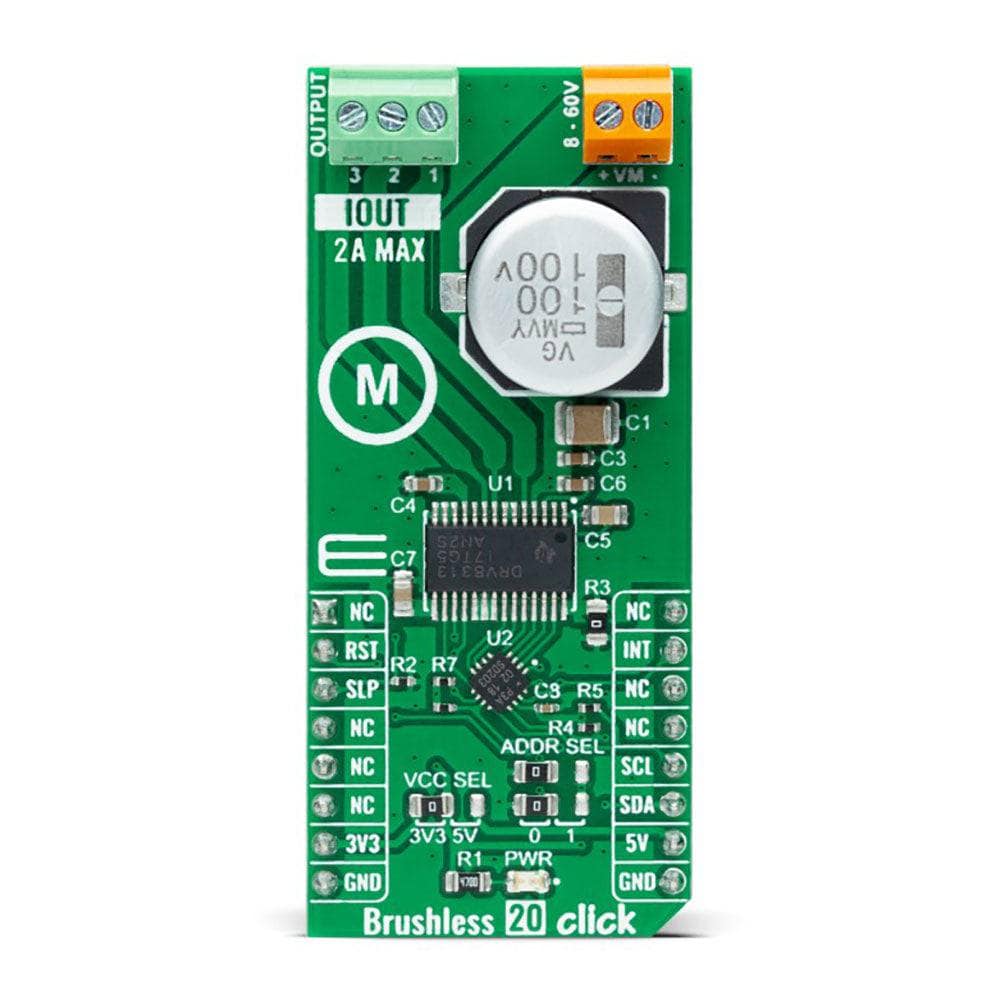
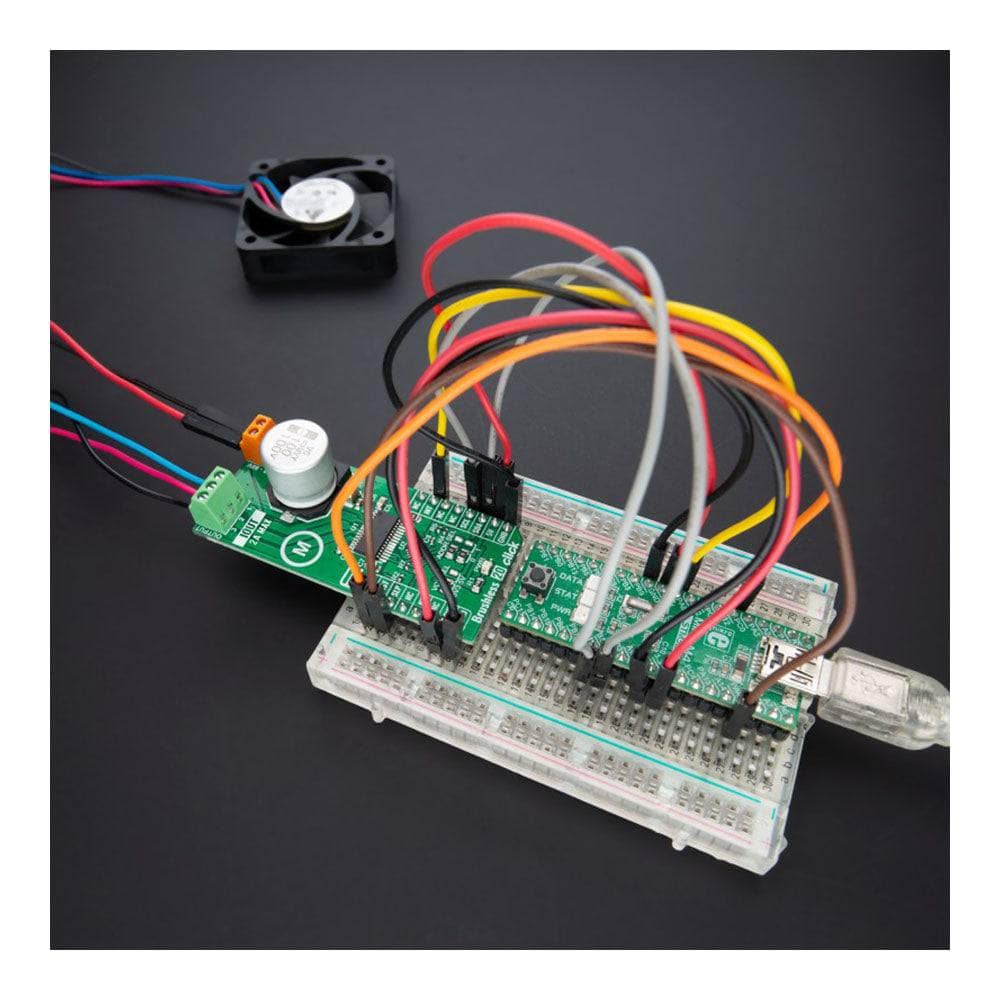
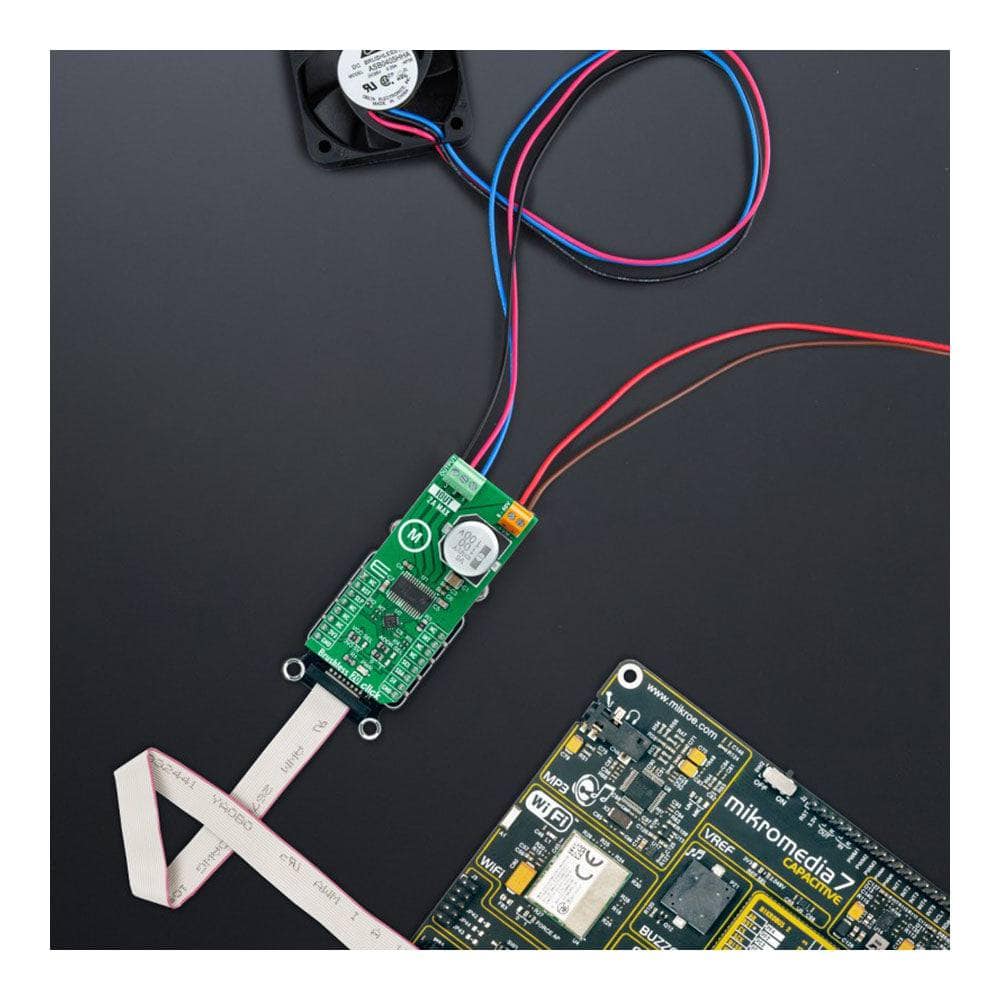
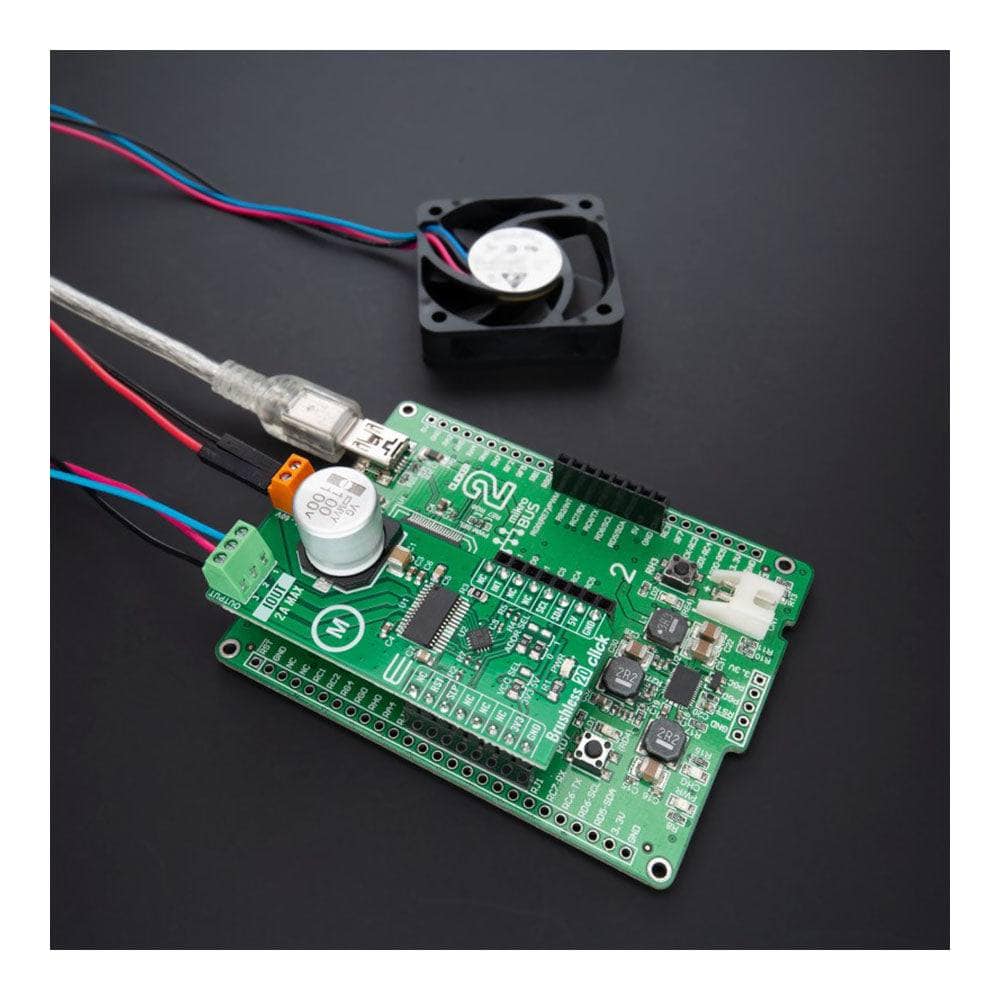
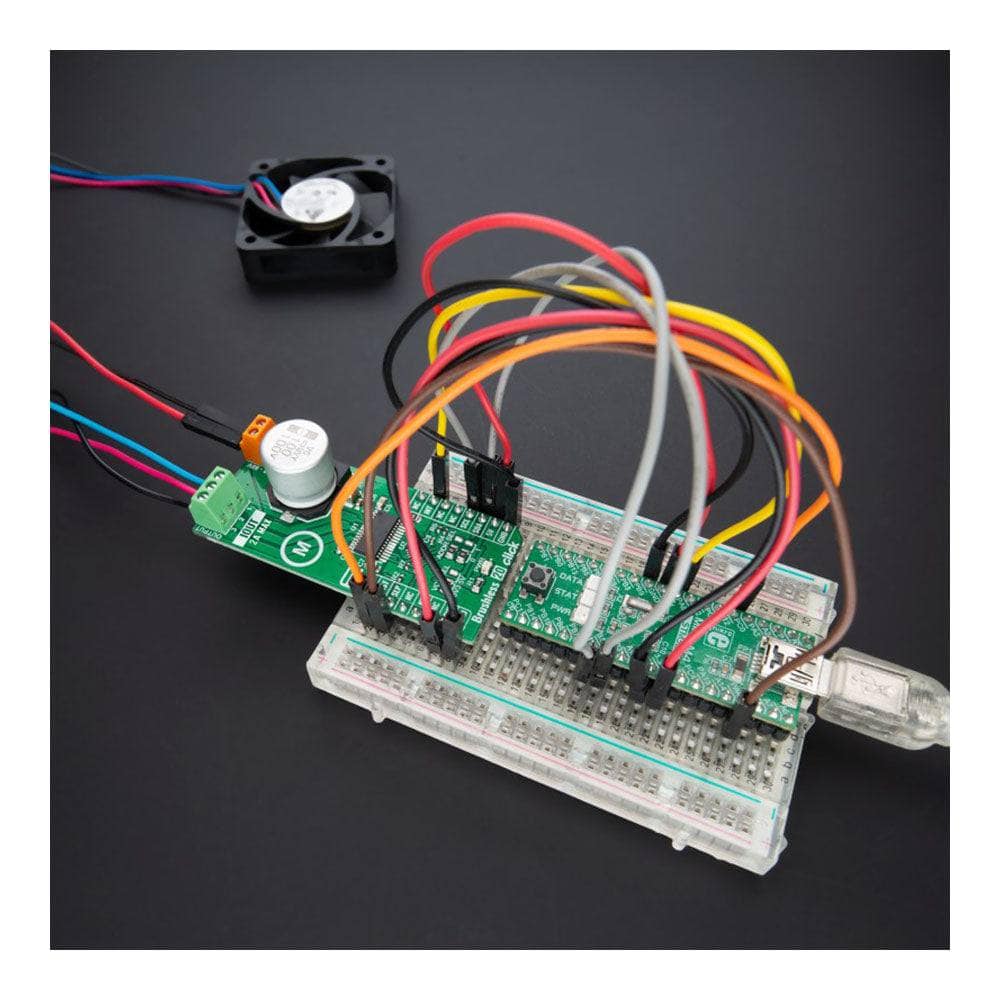
The Brushless 20 Click Board™ is a compact add-on board that controls brushless DC (BLDC) motors with any MCU. This board features the DRV8313, a fully integrated three-phase BLDC motor driver from Texas Instruments. It provides three individually controllable half-H-bridge drivers intended to drive a three-phase BLDC motor, solenoids, or other loads. Each output driver channel consists of N-channel power MOSFETs configured in a 1/2-H-bridge configuration. Besides, it has a wide operating voltage range from 8V to 60V, alongside several built-in protection circuits such as under-voltage, charge pump faults, overcurrent, and over-temperature. This Click board™ makes the perfect solution for driving three-phase brushless DC motors up to 2A output current rating.
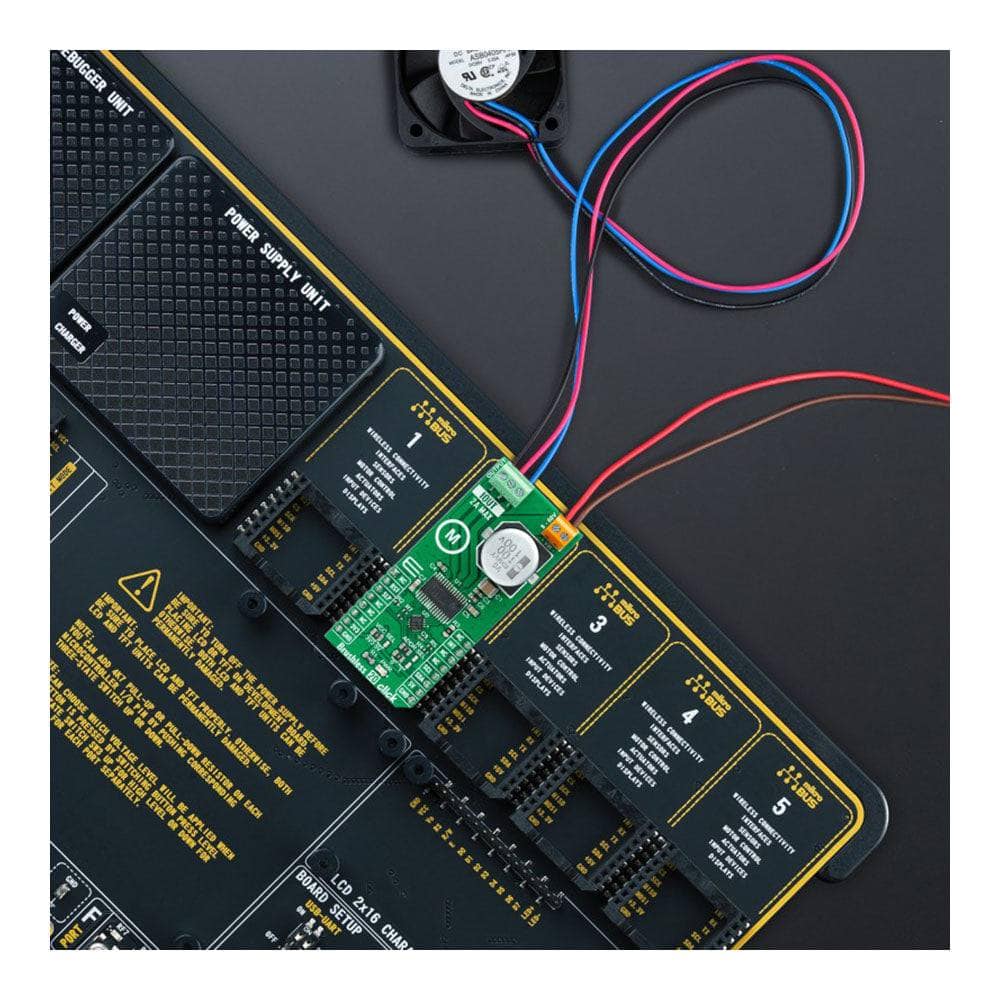
The Brushless 20 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
How Does The Brushless 20 Click Board™ Work?
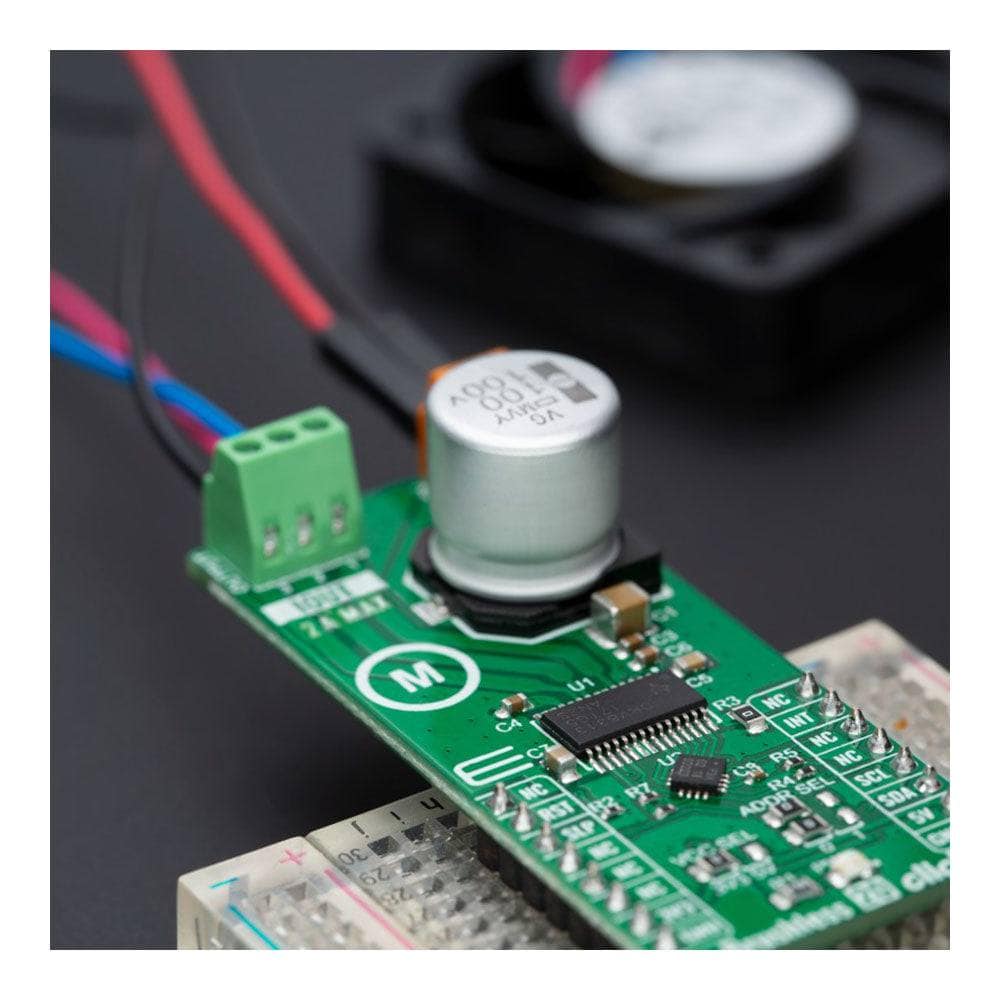
The Brushless 20 Click Board™ as its foundation uses the DRV8313, a fully integrated three-phase BLDC motor driver from Texas Instruments. The highly integrated DRV8313 comes with PWM/enable control interface, wide voltage operating range, an integrated 10mA LDO, and robust on-chip protection features. Low RDSON and efficient switching algorithms ensure excellent thermal performance and high drive capability. This Click board™ offers an energy-saving solution and quiet motor operation for brushless DC (BLDC) motors used in various applications.
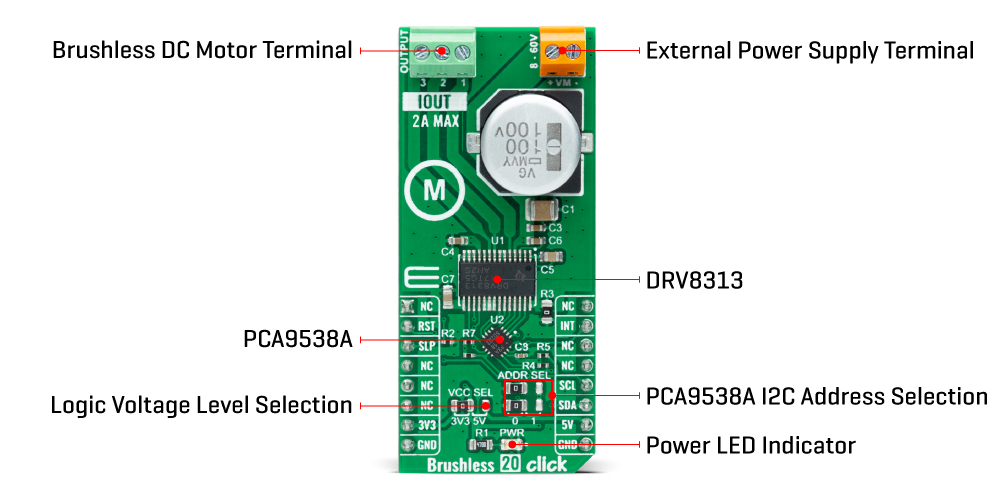
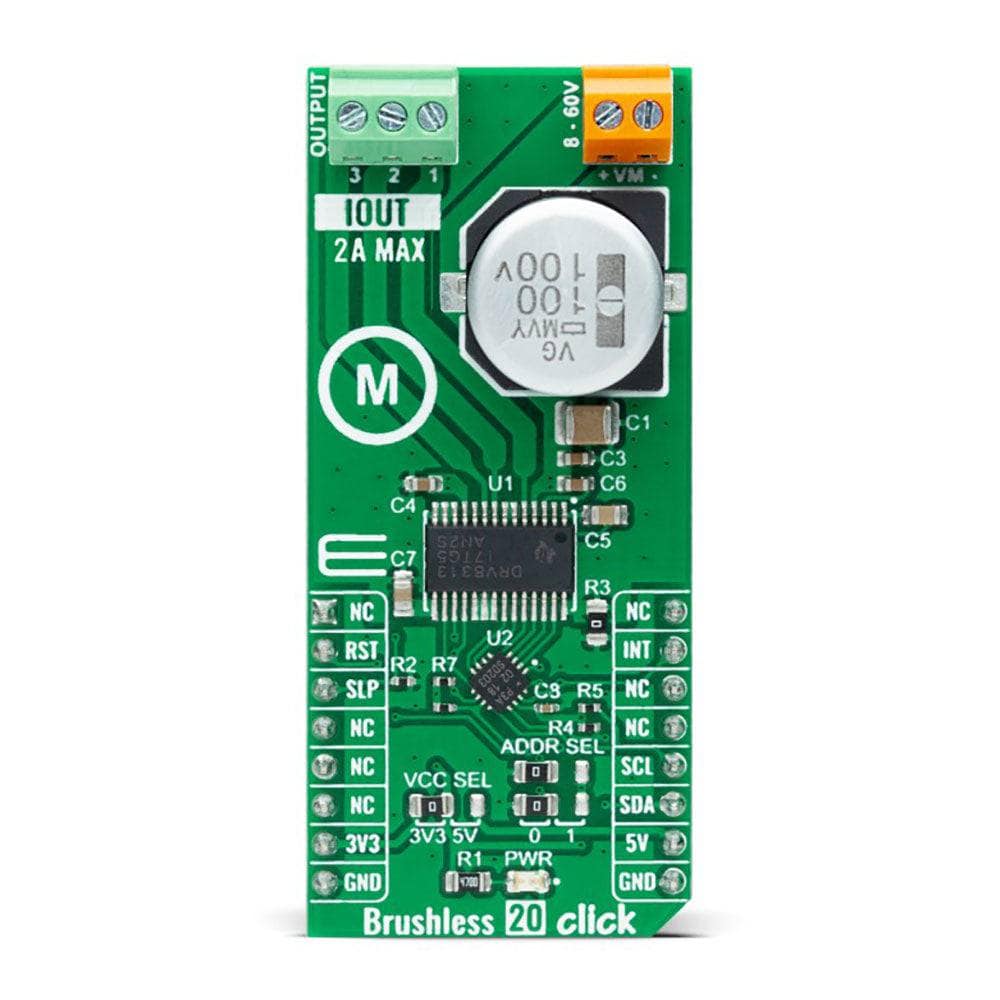
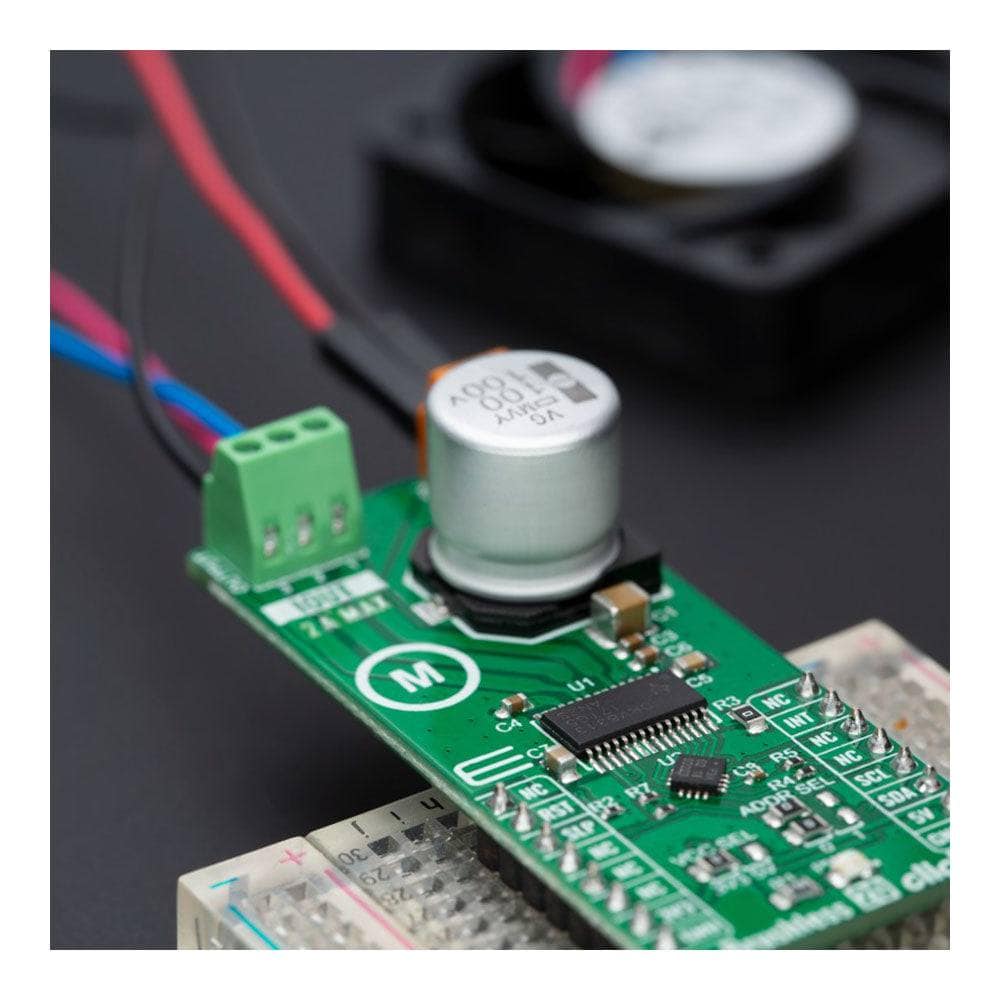
Each output driver channel consists of N-channel power MOSFETs configured in a 1/2-H-bridge configuration. Control pins can be accessed through the I2C interface and the PCA9538A port expander, with which the states of those pins, alongside the state of the output terminals, can be directly controlled. The PCA9538A also allows choosing the least significant bit (LSB) of its I2C slave address by positioning SMD jumpers labelled as ADDR SEL to an appropriate position marked as 0 and 1, alongside its interrupt and Reset features routed to the INT and RST pins of the mikroBUS™ socket.
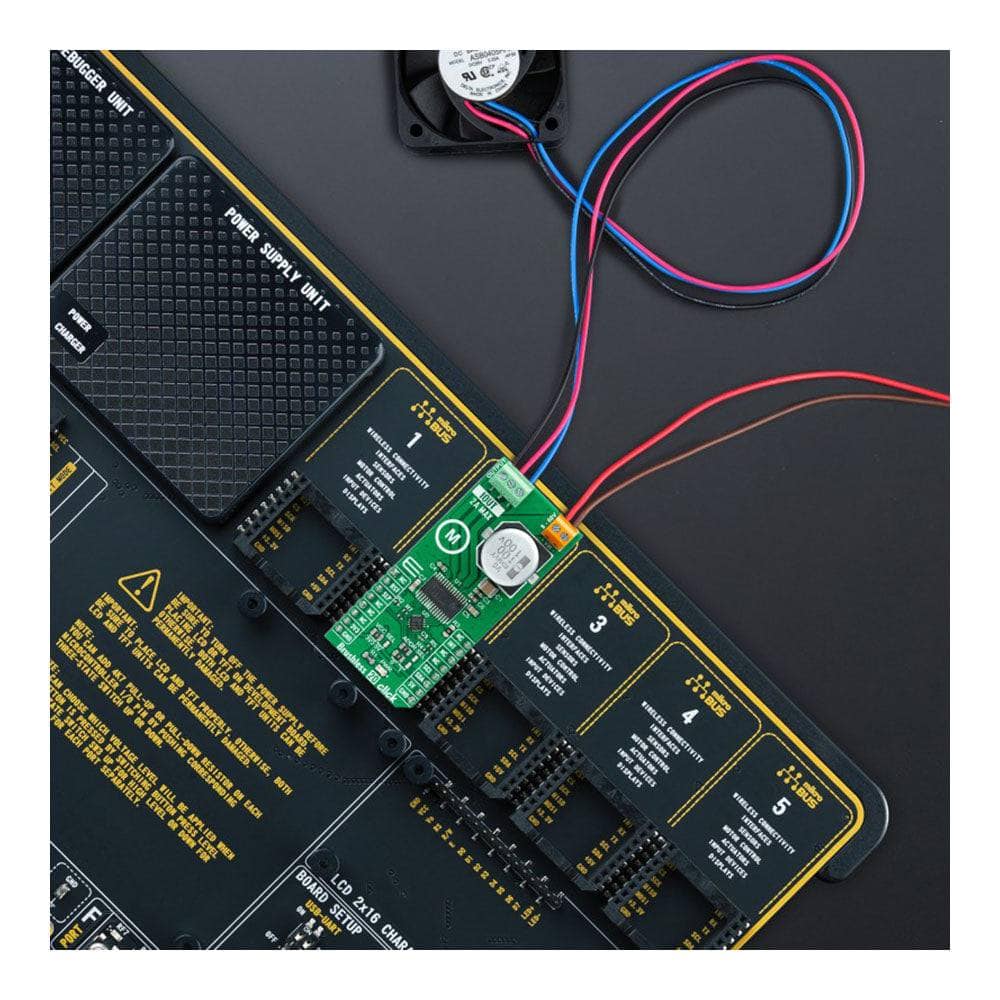
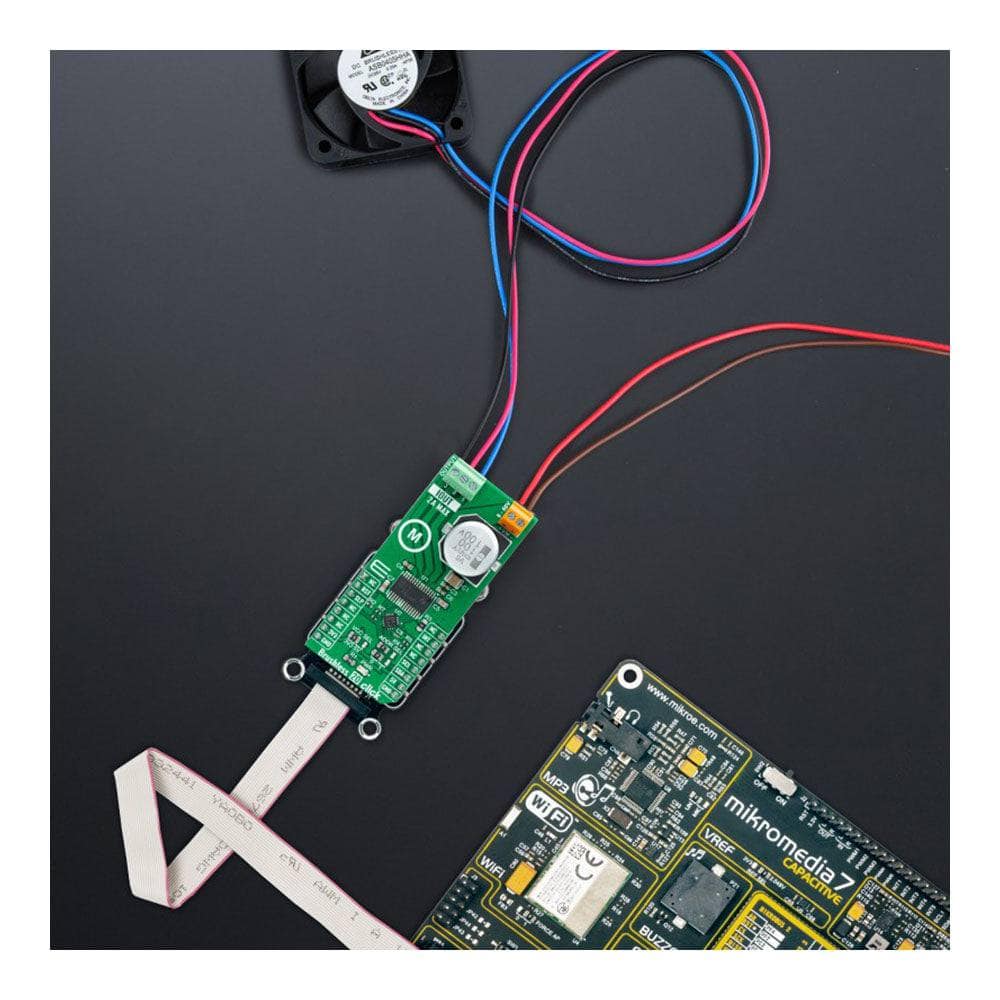
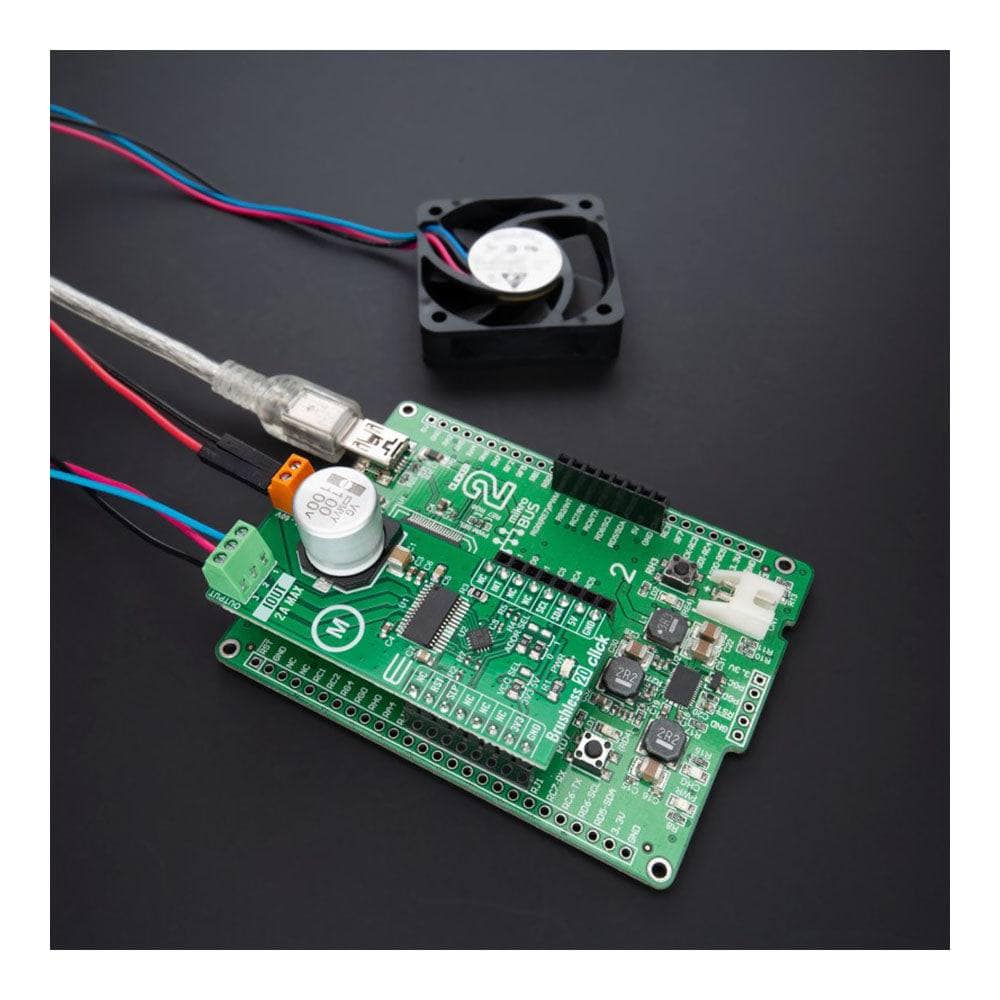
The DRV8313 is active unless the SLP pin, routed to the CS pin of the mikroBUS™ socket, is brought to a low logic state. The charge pump and output FETs are disabled in sleep mode, alongside the internal LDO regulator. The DRV313 is automatically brought out of sleep mode if SLP is brought to a logic high state. This board also supports an external power supply for the motor, which can be connected to the input terminal labelled as VM and should be within the range of 8V to 60V, while the BLDC motor coils can be connected to the terminals labelled as 1, 2, and 3.
The Brushless 20 Click Board™ can operate with both 3.3V and 5V logic voltage levels selected via the VCC SEL jumper. This way, it is allowed for both 3.3V and 5V capable MCUs to use the communication lines properly. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.
SPECIFICATIONS
| Type | Brushless |
| Applications | Can be used for driving three-phase brushless DC motors up to 2A output current rating |
| On-board modules | DRV8313 - three-phase BLDC motor driver from Texas Instruments |
| Key Features | Triple 1/2 H-bridge driver, high current drive capability, low MOSFET ON resistance, integrated protection features, sleep mode for standby operation, and more |
| Interface | I2C |
| Compatibility | mikroBUS |
| Click board size | L (57.15 x 25.4 mm) |
| Input Voltage | 3.3V or 5V |
PINOUT DIAGRAM
This table shows how the pinout of the Brushless 20 Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | NC | ||
| Reset | RST | 2 | RST | INT | 15 | INT | Interrupt |
| Sleep Mode | SLP | 3 | CS | RX | 14 | NC | |
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| JP1 | VCC SEL | Left | Logic Level Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
| JP2-JP3 | ADDR SEL | Left | I2C Address Selection 0/1: Left position 0, Right position 1 |
BRUSHLESS 20 CLICK ELECTRICAL SPECIFICATIONS
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | 3.3 | - | 5 | V |
| External Supply Voltage Range | 8 | - | 60 | V |
| Maximum Output Current | - | - | 2 | A |
| Operating Temperature Range | -40 | +25 | +120 | °C |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-5294
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027387913
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.