



Mikroelektronika d.o.o.
Accel 8 Click Board™
Accel 8 Click Board™
SKU: MIKROE-3341
Couldn't load pickup availability


Overview
The Accel 8 Click Board™ is an advanced 6-axis motion tracking Click Board™, which utilizes the MPU6050, a very popular motion sensor IC, equipped with a 3-axis gyroscope and 3-axis accelerometer. It also features a Digital Motion Processor, a very powerful processing engine, which reduces the firmware complexity and the processing load of the host MCU. The output of each axis is digitized by a separate 16-bit ADC and processed by the DMP engine, offering motion data over the I2C Interface.
Packed with a set of very powerful options, the Accel 8 Click Board™ represents an ideal solution for the development of Motion Interface based applications.
Downloads
MPU6050 is produced utilising the innovative Nasiri Fabrication platform, specialised in MEMS production and its integration with accompanying logic sections, on a wafer level. This allows very high integration and very small dimensions, at an affordable cost. Besides the size, features such as low-power consumption, high precision of motion detection, high shock tolerance, and programming capabilities, make it a MotionInterface™ enabled device, which can be used for development of different types of motion detection based applications, including gesture command, augmented reality, vehicle navigation, image stabilization in photography, and other similar applications.
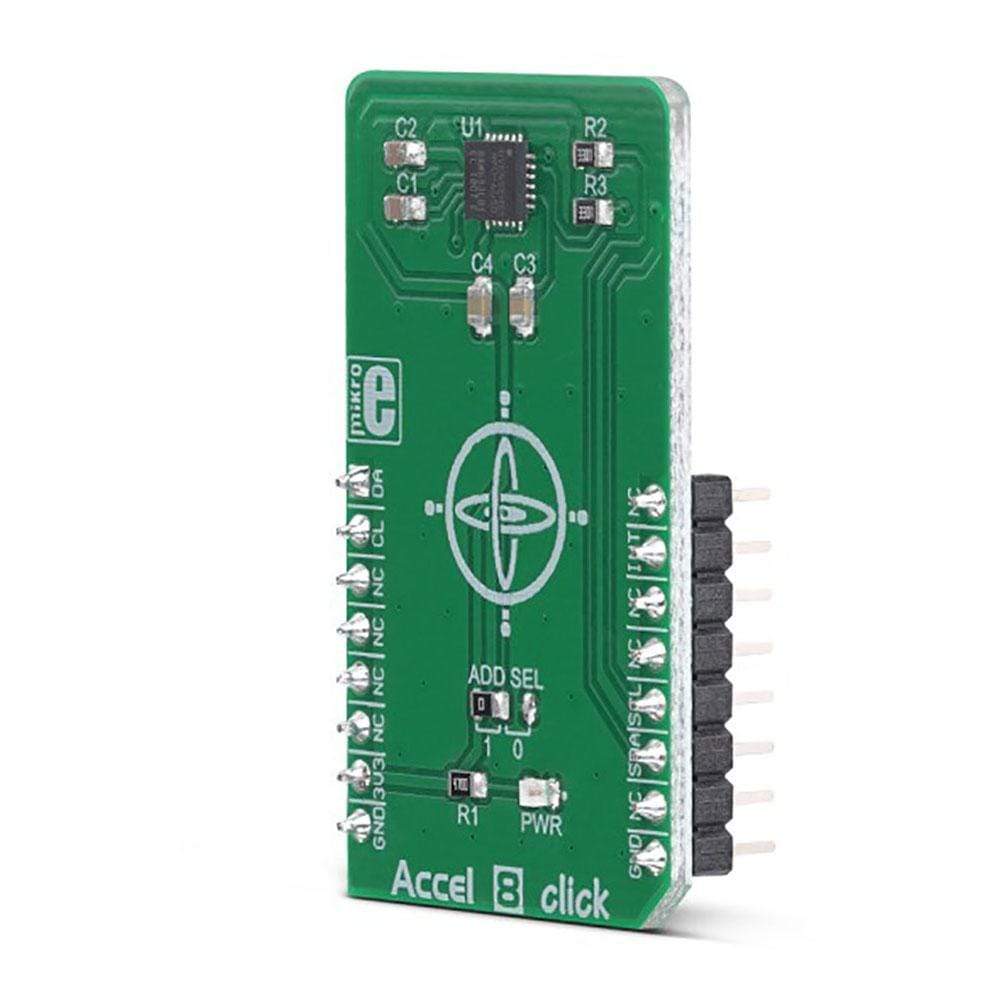
How Does The Accel 8 Click Board™ Work?
The Accel 8 Click Board™ is based around the MPU6050, a motion tracking sensor IC, from TDK Invensense. It is an advanced, integrated microelectromechanical gyroscope and accelerometer sensor (MEMS), combined with the powerful data processing engine. There is a respective accelerometer or gyroscope MEMS on each axis. The output of each MEMS is processed and digitized by a separate sigma-delta 16-bit A/D converter (ADC). The outputs can be processed by a programmable low-pass filter, while their sample rate can be selected by the user.
.jpg)
Three-axis gyroscope MEMS can be programmed to measure the rotation about each axis, in four different ranges of rotational speed (degrees per angle, DPS): ±250, ±500, ±1000, and ±2000. Three-axis accelerometer MEMS can be programmed to measure the acceleration along each axis, in four different acceleration ranges: ±2g, ±4g, ±8g, and ±16g. The user can select an optimal range for both properties, depending on the application requirements.
The embedded Digital Motion Processor™ can process complex 6-axis motion detection and gesture recognition algorithms without taking up processing cycles of the host microcontroller (MCU), making it perfectly suited for different kinds of low-power applications. The DMP engine offers a high output data rate (ODR), improving measurement accuracy. Due to DMP hardware-accelerated motion detection algorithms, MPU60x0 are very popular motion tracking ICs and there are many different designs using both MPU6050 and MPU6000 (e.g. MPU IMU click). Unlike the MPU6000, the MPU6050 uses the I2C communication interface.
MPU6050 incorporates a powerful programmable interrupt engine. The interrupt engine can generate a signal on the interrupt pin for several interrupt sources, including FIFO Buffer overflow, Data Ready, I2C Master Error, and I2C Slave Error. The interrupt is routed to the INT pin of the mikroBUS™.
A FIFO buffer helps to further reduce the processing load, offering temporary storage for the output data. The MPU6050 features a FIFO buffer with the capacity of 1024 bytes. The user can select which data will be stored in the FIFO buffer: gyro data, accel data, temperature readings, and auxiliary sensor readings. Once the FIFO buffer is full, it will start discarding the oldest data, allowing new data to be written. The FIFO buffer overflow condition can be used to trigger an interrupt, alerting the host MCU about its status.
Another powerful feature of the MPU6050 is its ability to be interfaced with an additional sensor, such as the 3-axis compass. By utilizing the MotionFusion™ firmware on the chip, along with the run-time calibration, it offers the complete 9-axis motion sensing solution. This sensor can be connected to the auxiliary I2C pins, routed to the mikroBUS™. Aux I2C clock pin is routed to the RST pin of the mikroBUS™ and it is labeled as CL, while the Aux I2C data pin is routed to the AN pin of the mikroBUS™, labeled as DA. Besides the compass sensor, other general-purpose sensors that use I2C interface can be connected, too. An interrupt can be generated if there is an error in the communication between the MPU6050 and the auxiliary sensor.
The I2C address of the MPU6050 can be selected by the ADD SEL jumper. This SMD jumper is used to select the least significant bit (LSB) of the 7-bit I2C address. The value of the LSB is decided by the position of this jumper.
The Accel 8 Click Board™ uses the I2C communication interface. It has pull-up resistors connected to the mikroBUS™ 3.3V rail. Proper conversion of logic voltage levels should be applied before the Click board™ is used with MCUs operated with 5V.
SPECIFICATIONS
| Type | Motion,Gyroscope,Acceleration |
| Applications | It is a perfect solution for development of different types of motion detection-based applications, including gesture command, augmented reality, vehicle navigation, image stabilization in photography, and other similar applications. |
| On-board modules | MPU6050, a six-axis (gyro + accelerometer) MEMS MotionTracking™ IC, from TDK Invensense. |
| Key Features | Digital Motion Processor™ engine with motion processing and gesture recognition algorithms, 6 independent MEMS, one on each axis, sampled by a separate 16-bit ADC, AUX I2C interface for additional sensor supported by the MotionFusion™ engine, output data filtering, selectable accel and gyro ranges… |
| Interface | I2C,GPIO |
| Compatibility | mikroBUS |
| Click board size | M (42.9 x 25.4 mm) |
| Input Voltage | 3.3V |
PINOUT DIAGRAM
This table shows how the pinout on the Accel 8 Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| Aux I2C Data | DA | 1 | AN | PWM | 16 | NC | |
| Aux I2C Clock | CL | 2 | RST | INT | 15 | INT | Interrupt |
| NC | 3 | CS | RX | 14 | NC | ||
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | +3V3 | 7 | 3.3V | 5V | 10 | NC | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED indicator |
| JP1 | ADD SEL | Left | I2C slave address LSB selection: left position 1, right position 0 |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3341
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018714407
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.