







Mikroelektronika d.o.o.
Stepper 17 Click Board
Stepper 17 Click Board
Couldn't load pickup availability
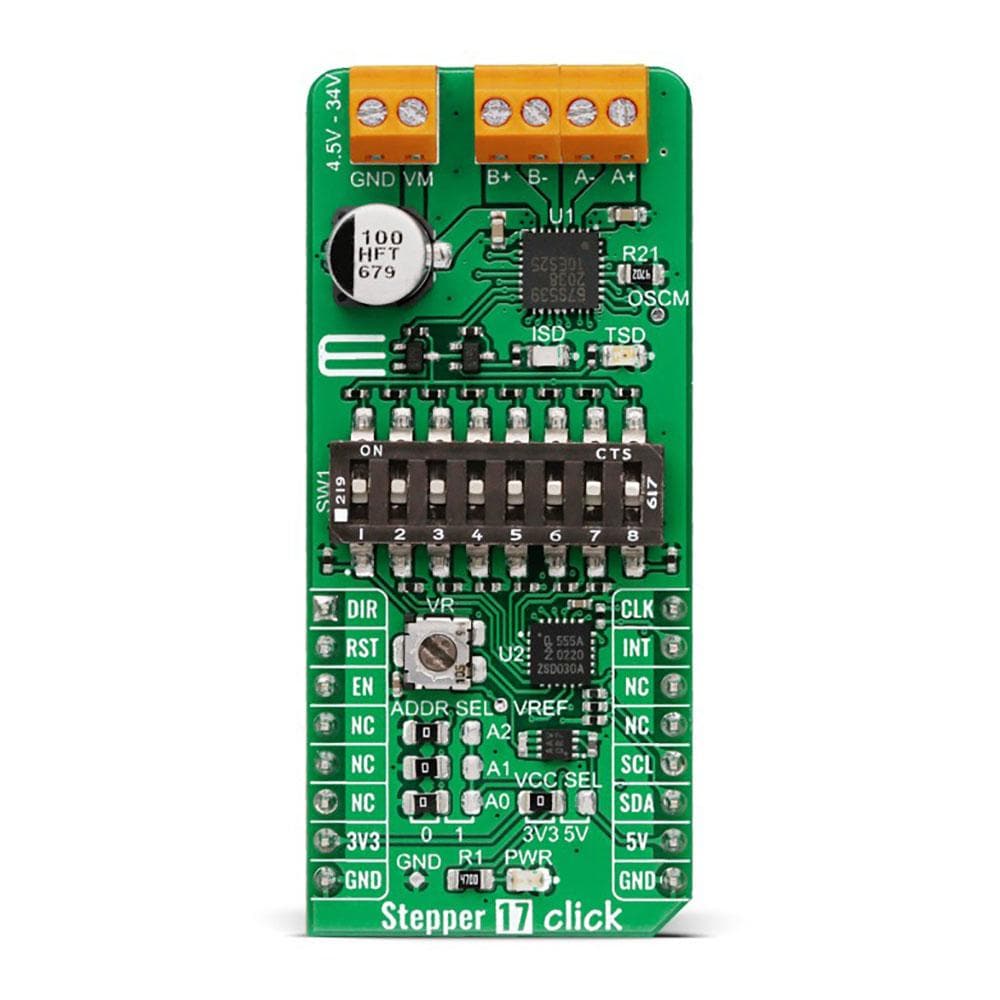
The Stepper 17 Click Board™ is a compact add-on board that contains a bipolar stepper motor driver. This board features the TB67S539FTG, a two-phase bipolar stepping motor driver using a PWM chopper from Toshiba Semiconductor. It supports a PWM constant-current control drive without a current sense resistor for motor-current detection and full-step to 1/32 steps resolution for less motor noise and smoother control. It has a wide operating voltage range of 4.5V to 34V with an output current capacity of 1.8A maximum in addition to several anomaly detection indicators.
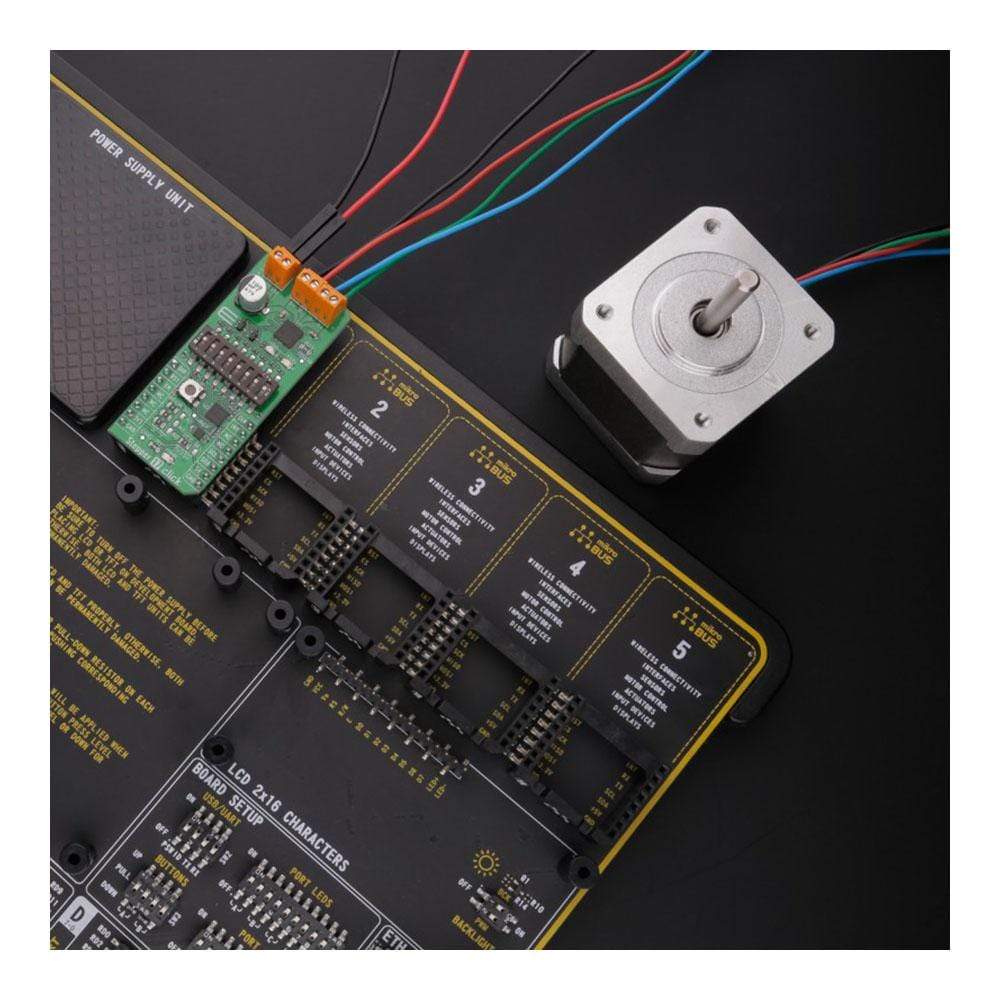
The Stepper 17 Click Board™ makes the perfect solution for small stepping motors in a wide range of applications such as office automation, commercial and industrial equipment.



Software Support
We provide a library for the Stepper 17 Click Board™ as well as a demo application (example), developed using MikroElektronika compilers. The demo can run on all the main MikroElektronika development boards.
The package can be downloaded/installed directly from NECTO Studio Package Manager(recommended way), downloaded from our LibStock™ or found on mikroE Github account.
Library Description
This library contains API for the Stepper 17 Click Board™.
Key Functions
stepper17_cfg_setup- Config Object Initialization function.stepper17_init- Initialization function.stepper17_default_cfg- Click Default Configuration function.
Example Description
This is an example application for showing the Stepper 17 Click Board™ click ability to control motor. First, it sets default configuration, then runs motor on every turn it stops when makes a full circle and it changes direction on every iteration and on every CW movement changes step resolution.
void application_task ( void )
{
static uint32_t counter = 0;
static uint8_t run = 1;
static uint8_t dir = 1;
static uint8_t turns = 1;
static uint8_t step = 2;
if ( ( 0 == stepper17_get_int_state( &stepper17 ) ) && run )
{
counter++;
if ( counter == ( FULL_CIRCLE * turns ) )
{
//Stop motor
stepper17_set_en_state( &stepper17, 0 );
run = 0;
log_info( &logger, " Stop motor." );
Delay_ms( 2000 );
//Change direction
if ( dir )
{
log_info( &logger, " Move motor CCW." );
dir = 0;
stepper17_set_dir_state( &stepper17, dir );
}
else
{
log_info( &logger, " Move motor CW." );
dir = 1;
stepper17_set_dir_state( &stepper17, dir );
if ( 32 == step )
{
step = 2;
}
else
{
step *= 2;
}
set_step_resolution( step );
}
//Move motor
stepper17_set_en_state( &stepper17, 1 );
counter = 0;
run = 1;
}
else
{
while ( 0 == stepper17_get_int_state( &stepper17 ) );
}
}
}
The full application code, and ready to use projects can be installed directly from NECTO Studio Package Manager(recommended way), downloaded from our LibStock™ or found on mikroE Github account.
Other mikroE Libraries used in the example:
- MikroSDK.Board
- MikroSDK.Log
- Click.Stepper17
Additional notes and informations
Depending on the development board you are using, you may need a USB UART click, USB UART 2 click or RS232 click to connect to your PC, for development systems with no UART to USB interface available on the board. The terminal available in all MikroElektronika compilers, or any other terminal application of your choice, can be used to read the message.
mikroSDK
The Stepper 17 Click Board™ is supported with mikroSDK - MikroElektronika Software Development Kit. To ensure proper operation of mikroSDK compliant Click board™ demo applications, mikroSDK should be downloaded from the LibStock and installed for the compiler you are using.
Stepper 17 Click Board
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.