



Mikroelektronika d.o.o.
LED Driver 9 Click Board™
LED Driver 9 Click Board™
SKU: MIKROE-4595
Couldn't load pickup availability


Key Features
Overview
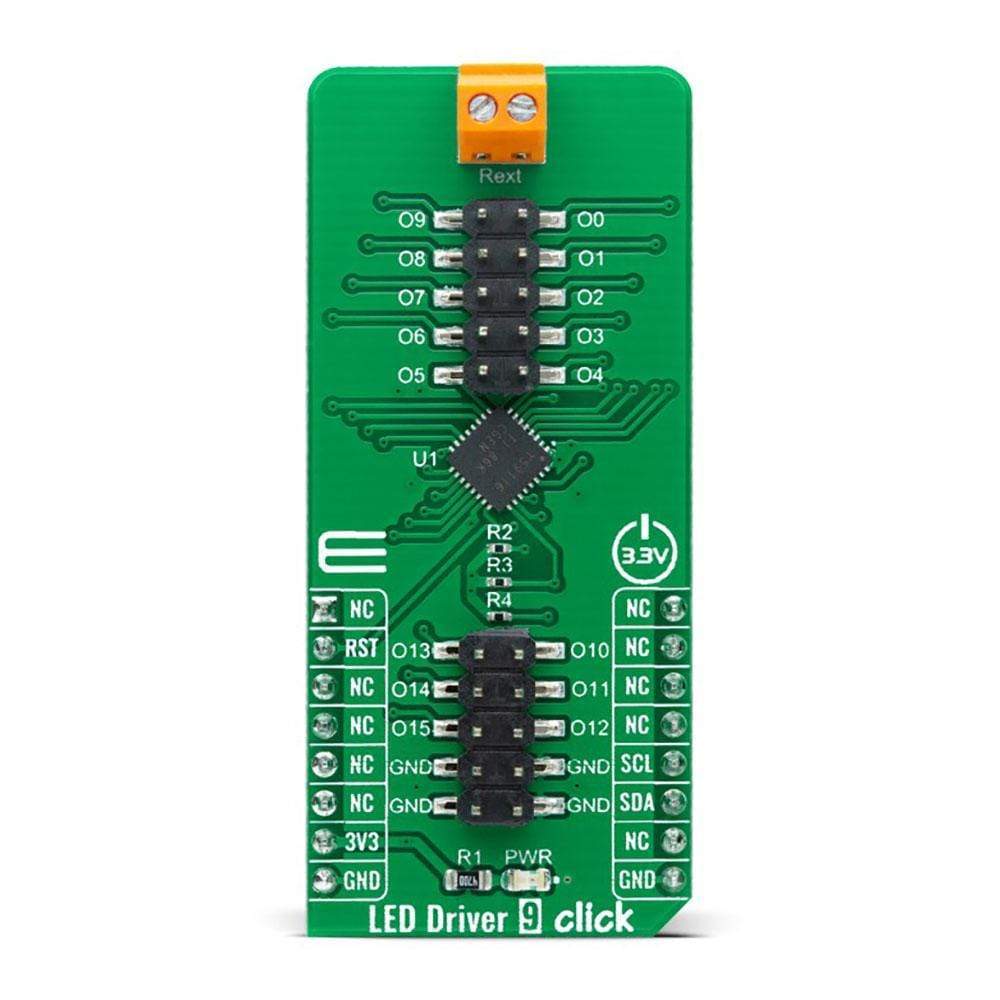
The LED Driver 9 Click Board™ is a compact add-on board that simplifies the control of multiple LEDs. This board features the TLC59116, I2C bus-controlled 16-channel LED driver optimized for red/green/blue/amber (RGBA) colour mixing and backlight application from Texas Instruments. Each 16-channel LED output has its 8-bit resolution (256 steps), fixed-frequency, individual PWM controller that operates at 97 kHz, with a duty cycle that is adjustable from 0% to 99.6%. The PWM controller allows each LED to be set to a specific brightness value and dims or blinks all LEDs with the same value. This Click Board™ is suitable for RGBA colour mixing and backlight application for amusement products, LED status signalization, home automation projects, industrial equipment, and many more.
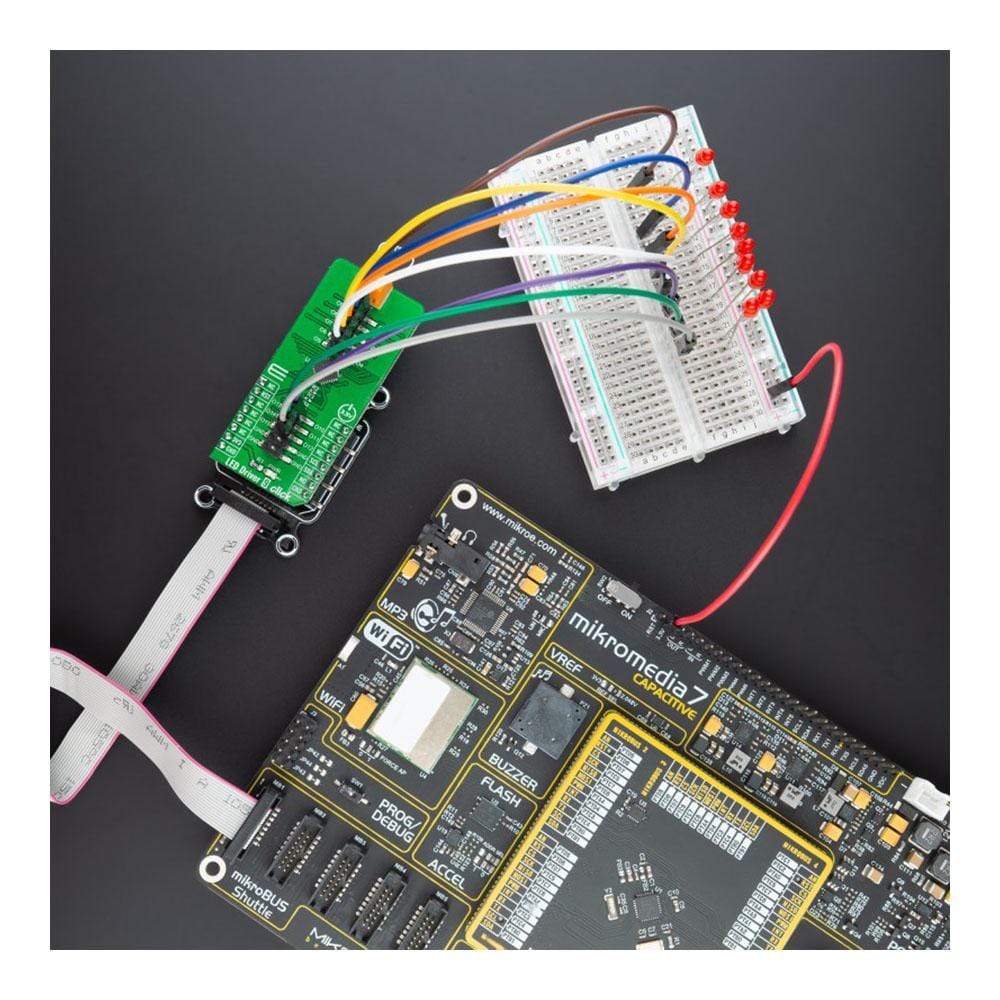
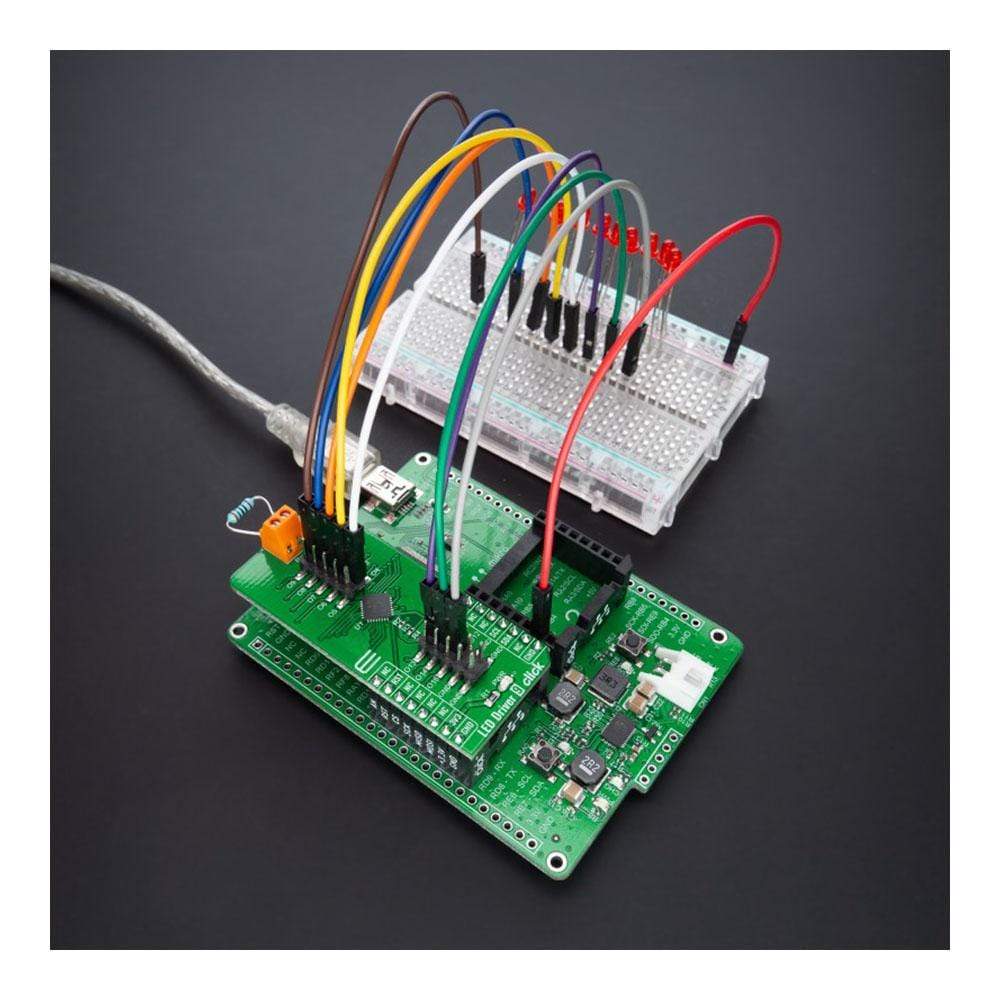
The LED Driver 9 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
How Does The LED Driver 9 Click Board™ Work?
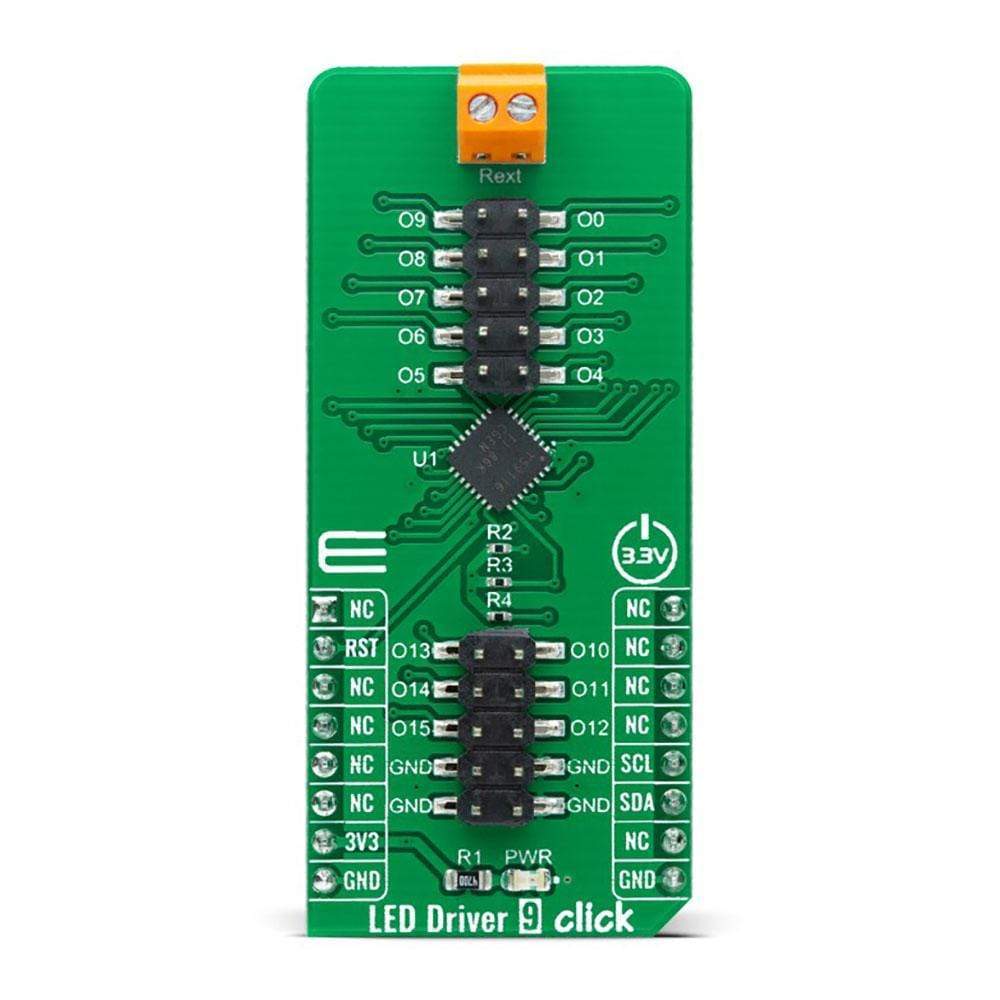
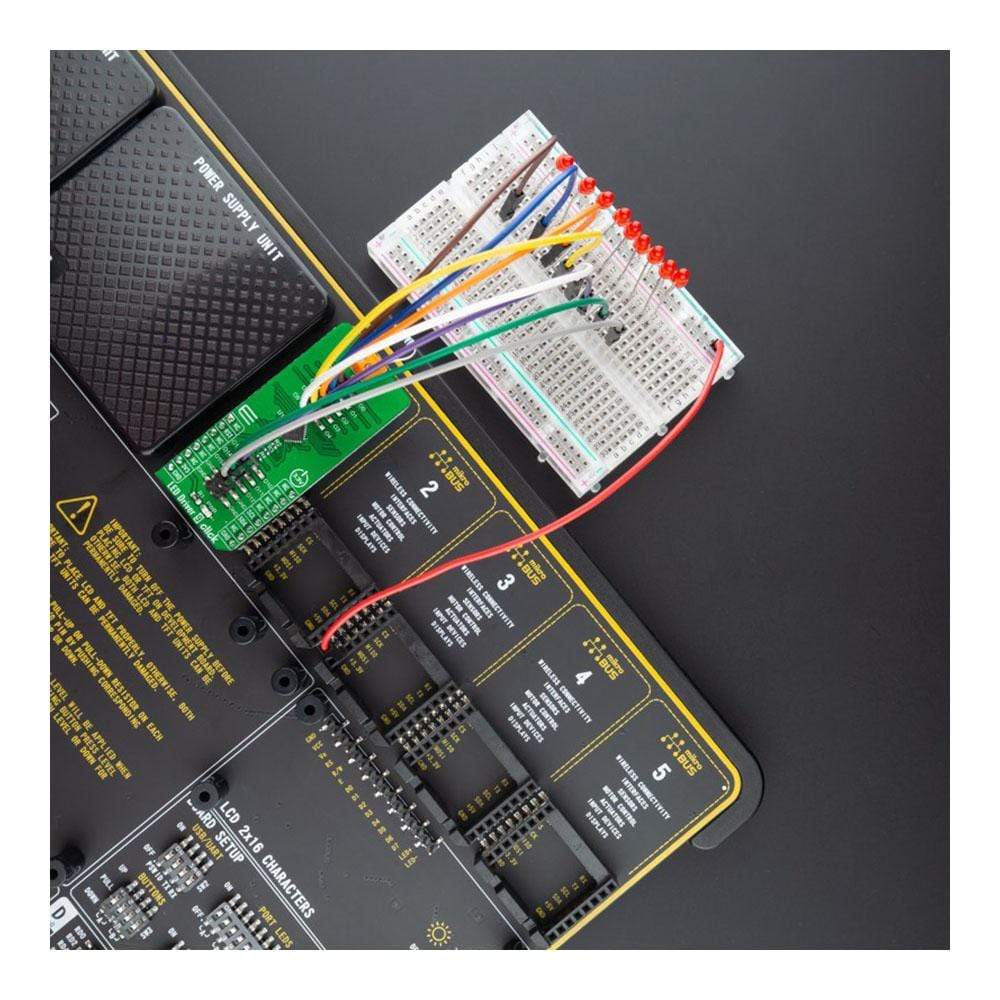
The LED Driver 9 Click Board™ as its foundation uses the TLC59116, an I2C bus controlled 16-channel LED driver optimized for red/green/blue/amber (RGBA) colour mixing and backlight application from Texas Instruments. It operates within a VCC supply voltage range where its outputs are 17V tolerant. Each LED output, 16 LED drivers presented on two 2x5 male headers, with a maximum output current of 120mA per channel, is programmable at OFF and ON state, has programmable individual LED brightness with group dimming and blinking.

Each LED output has its individual PWM controller, which allows each LED to be set at a specific brightness value. An additional 8-bit resolution (256 steps) group PWM controller has a fixed frequency of 190Hz and an adjustable frequency between 24Hz to once every 10.73 seconds, with an adjustable duty cycle from 0% to 99.6%.
The LED Driver 9 Click Board™ communicates with MCU using standard I2C 2-Wire interface, with a clock frequency up to 100kHz in the Standard, 400kHz in the Fast, and 1MHz in the Fast Mode Plus. The Software Reset feature allows the MCU to perform a reset of the TLC59116 through the I2C bus, identical to the Power-On Reset (POR) that initializes the registers to their default state, causing the outputs to be set high, which means that the LEDs are OFF. This allows an easy and quick way to reconfigure all device registers to the same condition. Also, this Click board™ has a Reset pin routed to the RST pin on the mikroBUS™ socket, which holds registers in their default states until the RST pin is set to a logic high state.
At the top of this Click board™, there is also a terminal labelled Rext used to connect an external resistor to set the LED current. The TLC59116 scales up the reference current set by the external resistor to sink the output current at each output port.
The LED Driver 9 Click Board™ can be operated only with a 3.3V logic voltage level. The board must perform appropriate logic voltage level conversion before use with MCUs with different logic levels. However, the Click board™ comes equipped with a library containing functions and an example code that can be used, as a reference, for further development.
SPECIFICATIONS
| Type | LED Drivers |
| Applications | Can be used for RGBA colour mixing and backlight application for amusement products, LED status signalization, home automation projects, industrial equipment, and many more. |
| On-board modules | TLC59116 - I2C bus controlled 16-channel LED driver optimized for red/green/blue/amber (RGBA) colour mixing and backlight application from Texas Instruments |
| Key Features | 16 LED programmable drivers, output current adjusted through an external resistor, supports hot insertion, programmable group dimming and blinking, and many more. |
| Interface | I2C |
| Compatibility | mikroBUS |
| Click board size | L (57.15 x 25.4 mm) |
| Input Voltage | 3.3V |
PINOUT DIAGRAM
This table shows how the pinout on the LED Driver 9 Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| NC | 1 | AN | PWM | 16 | NC | ||
| Reset | RST | 2 | RST | INT | 15 | NC | |
| NC | 3 | CS | RX | 14 | NC | ||
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | NC | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| J1-J2 | HM2x5 | Populated | LED Driver Channels |
LED DRIVER CLICK ELECTRICAL SPECIFICATIONS
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage | - | 3.3 | - | V |
| Maximum Output Current | - | - | 120 | mA |
| Maximum Output Voltage | - | - | 17 | V |
| Operating Temperature Range | -40 | +25 | +85 | °C |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4595
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027382550
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.