




Mikroelektronika d.o.o.
CAN Bus Click Board™
CAN Bus Click Board™
SKU: MIKROE-4640
Couldn't load pickup availability




Key Features
Overview
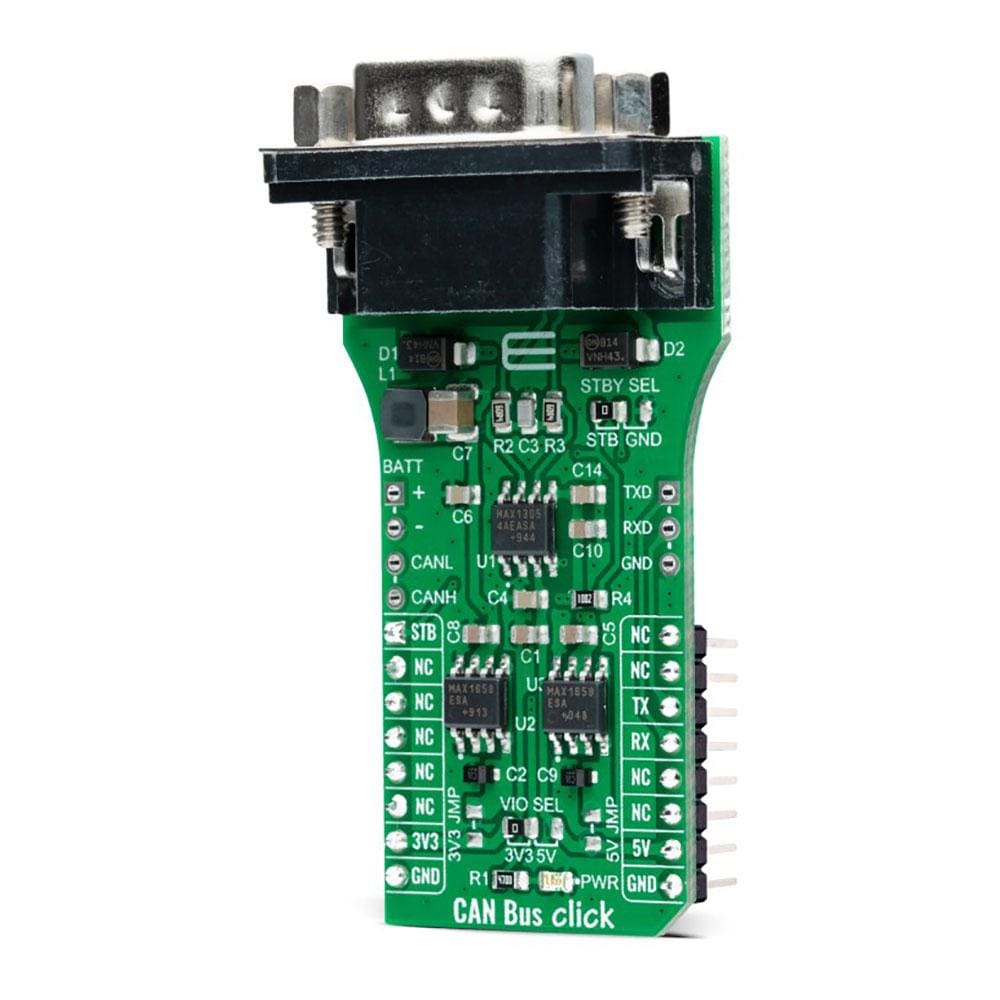
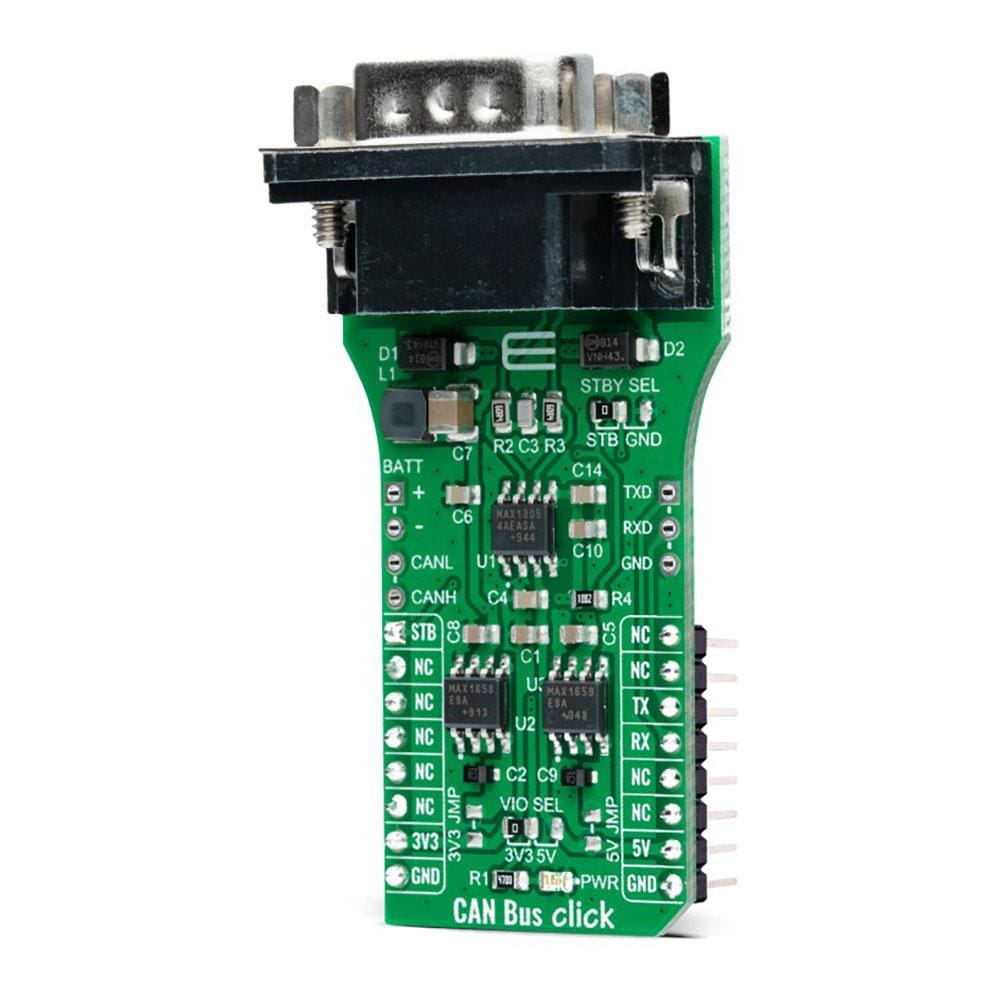
The CAN Bus Click Board™ is a compact add-on board that provides a link between the CAN protocol controller and the physical wires of the bus lines in a control area network (CAN). This board features the MAX13054, an industry-standard, high-speed CAN transceiver with extended ±80V fault protection from Maxim Integrated. The CAN transceiver has an input common-mode range greater than ±12V with data rates up to 1Mbps, exceeding the ISO11898 specification of -2V to +7V, and feature ±8kV ESD protection. It also comes with a Standby feature that shuts off the transmitter and switches the receiver to a low-current/low-speed state.
The CAN Bus Click Board™ is suitable for harsh industrial environments and industrial network applications where overvoltage protection is required.
Downloads
How Does The CAN Bus Click Board™ Work?
The CAN Bus Click Board™ as its foundation uses the MAX13054, ±80V fault-protected CAN-transceiver ideal for industrial network applications that require overvoltage protection from Maxim Integrated. The MAX13054 provides a link between the CAN protocol controller and the physical wires of the bus lines in a control area network (CAN). These devices can be used for DeviceNet applications, requiring data rates up to 1Mbps. Its input common-mode range is greater than ±12V, exceeding the ISO11898 specification of -2V to +7V, and features ±8kV Contact Discharge protection, making these devices ideal for harsh industrial environments.
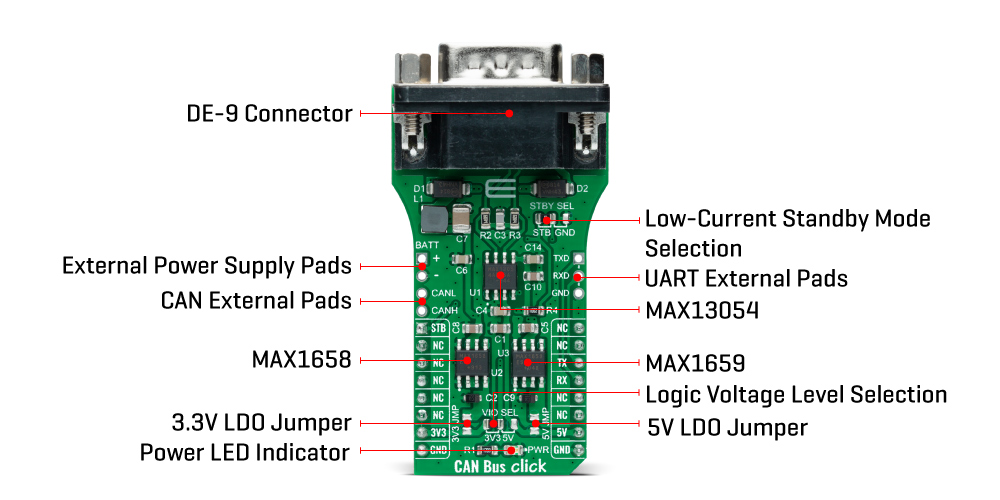

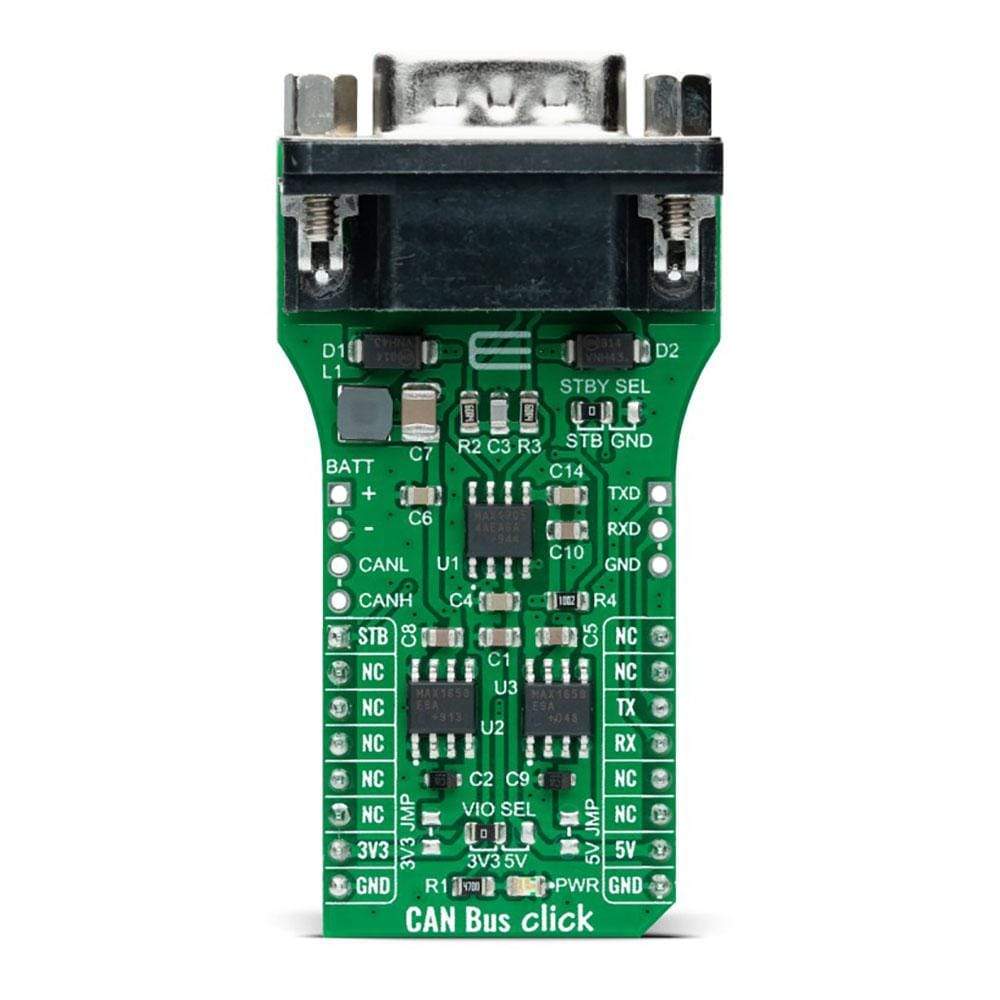
Its dominant timeout feature prevents the bus from being blocked by MCU. If the TXD input is held low for greater than 1ms, the transmitter becomes disabled, driving the bus line to a recessive state. In Standby mode, when STB pin routed on the AN and INT pin of the mikroBUS™ socket is set to a high logic state, the transmitter is switched off, and the receiver is switched to a low-current/low-speed state. Activation of Standby mode is possible by setting the onboard SMD jumper labelled as STBY SEL to an appropriate position marked as STB or GND.
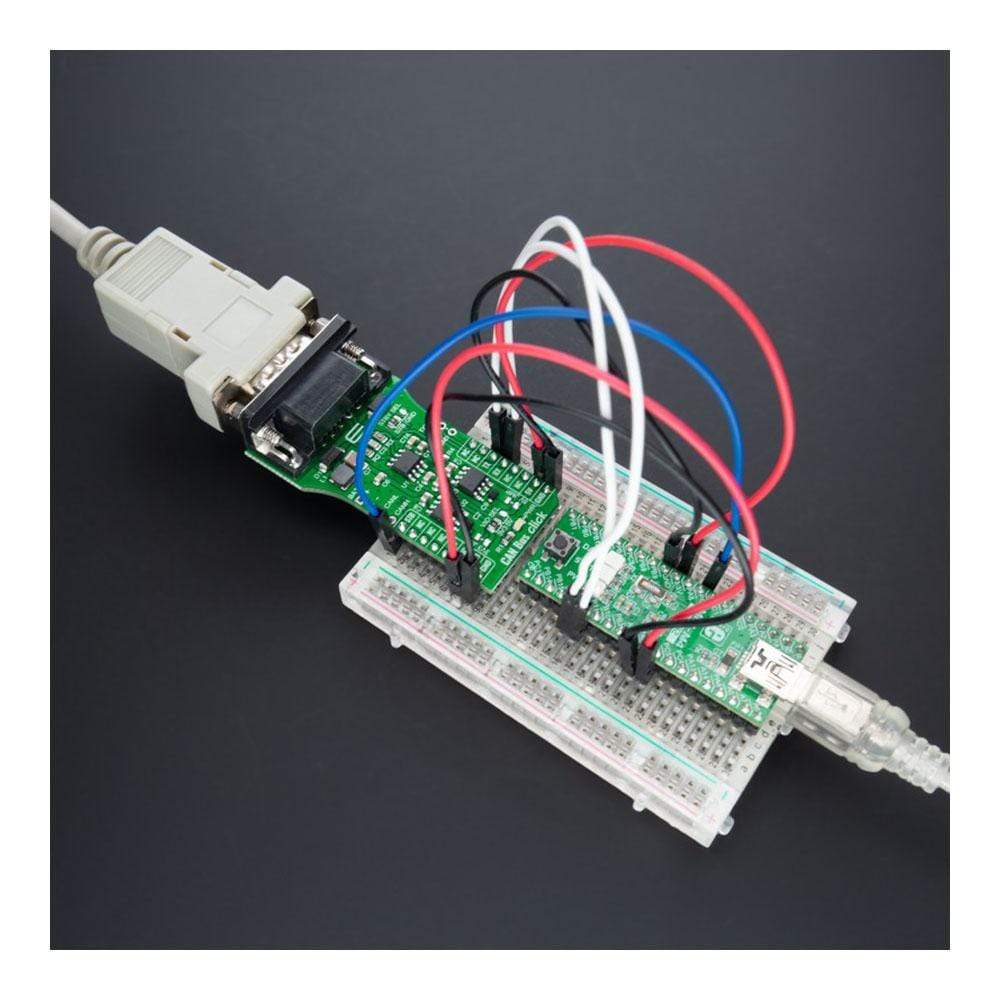
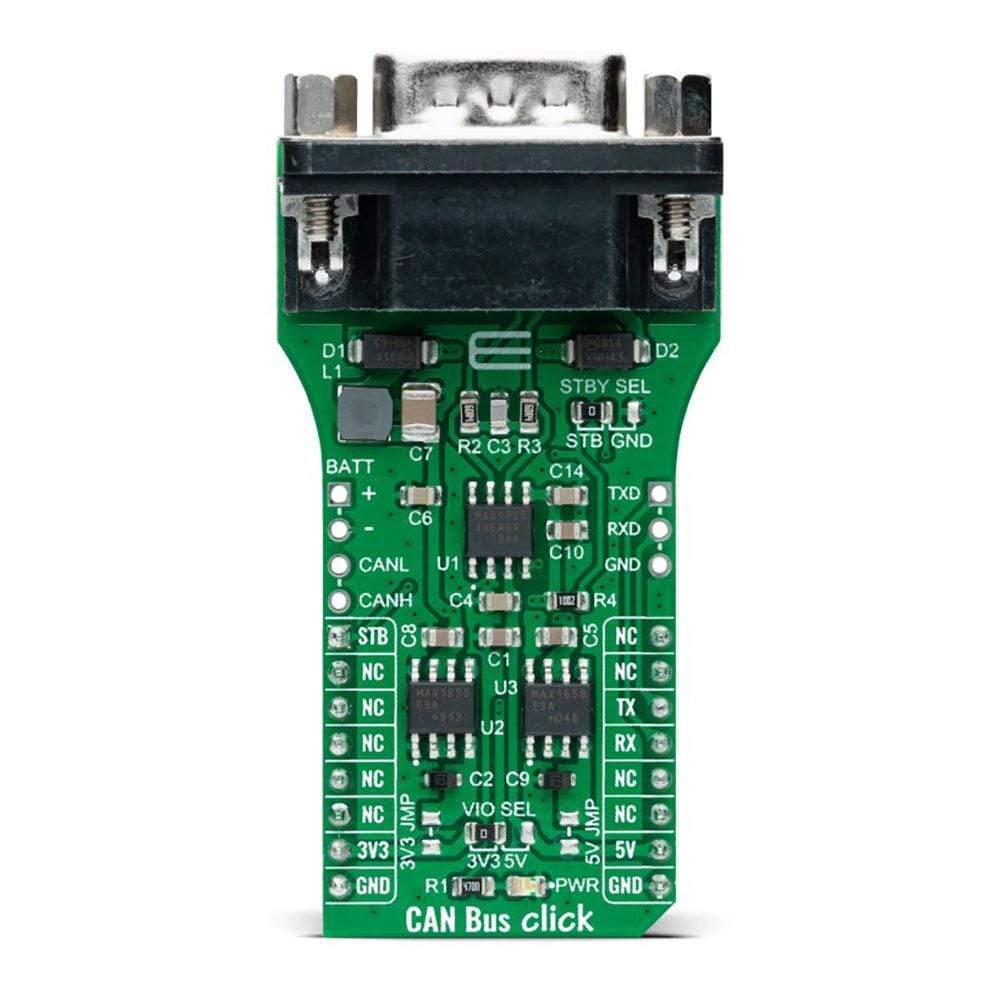
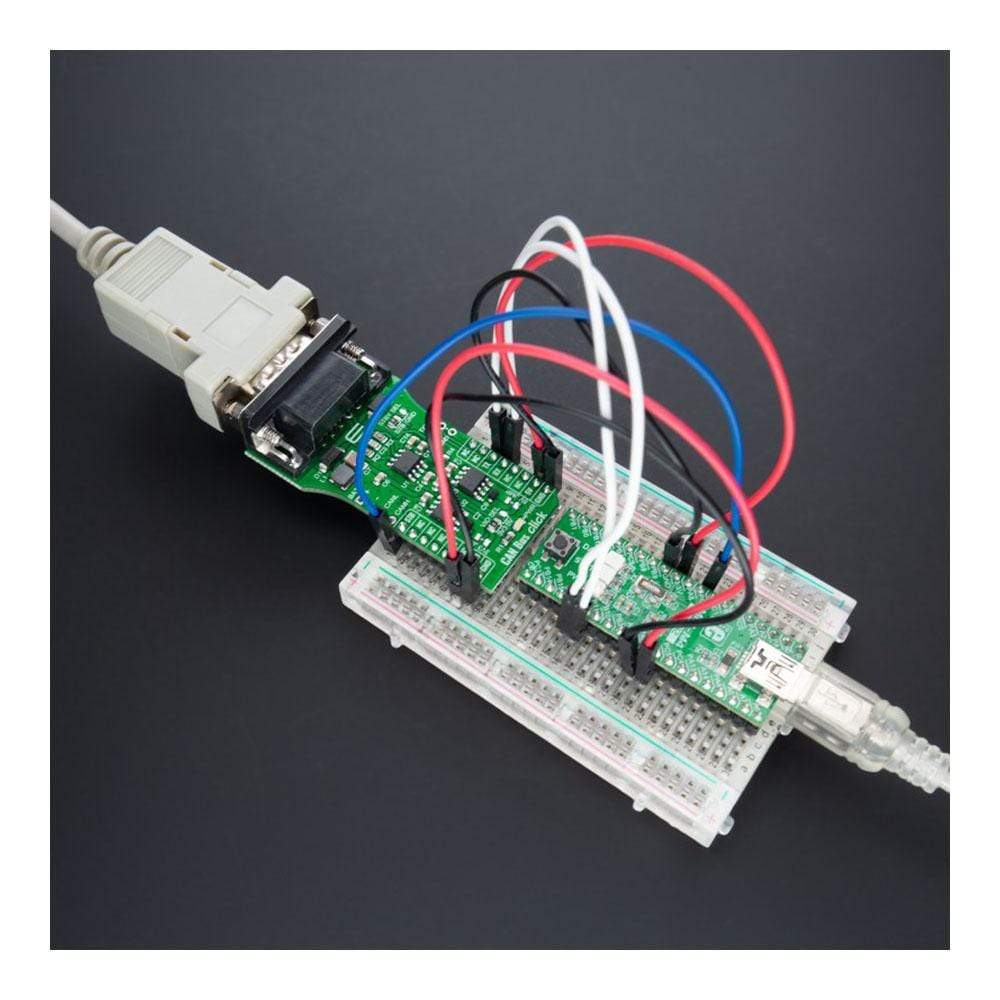
The MAX13054 communicates with MCU using the UART interface with the default baud rate of 115200 bps for the data transfer. In addition to UART communication pins from the mikroBUS™ socket, the user can connect the TX/RX signals directly through the UART External header on the right edge of the board. The CAN Bus Click Board™ comes equipped with the standard DB-9 connector, making interfacing with the CAN bus simple and easy. Besides, the user can connect the CAN signals directly through the CAN External header, also on the left edge of the board.
The external power supply in a range from 2.7V to 16.5V, next to the D-9 connector, can also be brought to the header labelled BATT on the board's left side. Through SMD jumpers labelled as 3V3 JMP and 5V JMP, the MAX1658/59 from Maxim Integrated LDOs output voltages can power up the mikroBUS™ 3.3V and 5V power rails. This feature makes the MAX13054 ideal for many different applications, including those in the automotive market. However, it should be noted that Mikroe does not advise powering up their systems this way. That is why these jumpers are left unpopulated by default.
The CAN Bus Click Board™ can operate with both 3.3V and 5V logic voltage levels selected via the VIO SEL jumper. It allows for both 3.3V and 5V capable MCUs to use the UART communication lines properly. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.
SPECIFICATIONS
| Type | CAN |
| Applications | Can be used for harsh industrial environments and industrial network applications where overvoltage protection is required |
| On-board modules | MAX13054 - ±80V fault-protected CAN-transceiver ideal for industrial network applications that require overvoltage protection from Maxim Integrated |
| Key Features | Fully compatible with the ISO11898 standard, ±80V fault protection, high-speed operation of up to 1Mbps, low-current Standby mode, transmit data dominant timeout, and more. |
| Interface | UART |
| Compatibility | mikroBUS |
| Click board size | L (57.15 x 25.4 mm) |
| Input Voltage | 3.3V or 5V, External |
PINOUT DIAGRAM
This table shows how the pinout for the CAN Bus Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin |
|
Pin | Notes | |||
|---|---|---|---|---|---|---|---|
| Standby Mode | STB | 1 | AN | PWM | 16 | NC | |
| NC | 2 | RST | INT | 15 | NC | ||
| NC | 3 | CS | RX | 14 | TX | UART TX | |
| NC | 4 | SCK | TX | 13 | RX | UART RX | |
| NC | 5 | MISO | SCL | 12 | NC | ||
| NC | 6 | MOSI | SDA | 11 | NC | ||
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| JP1 | VIO SEL | Left | Logic Level Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
| JP2 | STBY SEL | Left | Low-Current Standby Mode Selection STB/GND: Left position STB, Right position GND |
| JMPR1 | 3V3 JMP | Unpopulated | 3V3 LDO Jumper |
| JMPR2 | 5V JMP | Unpopulated | 5V LDO Jumper |
| J1 | BATT | Unpopulated | External Power Supply Header |
| J2 | UART | Unpopulated | External UART TX/RX Lines Header |
| J3 | CAN | Unpopulated | External CANH/CANL Lines Header |
CAN BUS CLICK ELECTRICAL SPECIFICATIONS
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage VIO | 3.3 | - | 5 | V |
| External Supply Voltage BATT | 2.7 | - | 16.5 | V |
| Receiver inputs voltage range | - | - | 1 | Mbps |
| Receiver inputs voltage range | -40 | +25 | +125 | °C |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4640
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027382796
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.