







Mikroelektronika d.o.o.
Multi Stepper TB62262 Click Board™
Multi Stepper TB62262 Click Board™
SKU: MIKROE-5037
Couldn't load pickup availability

Overview
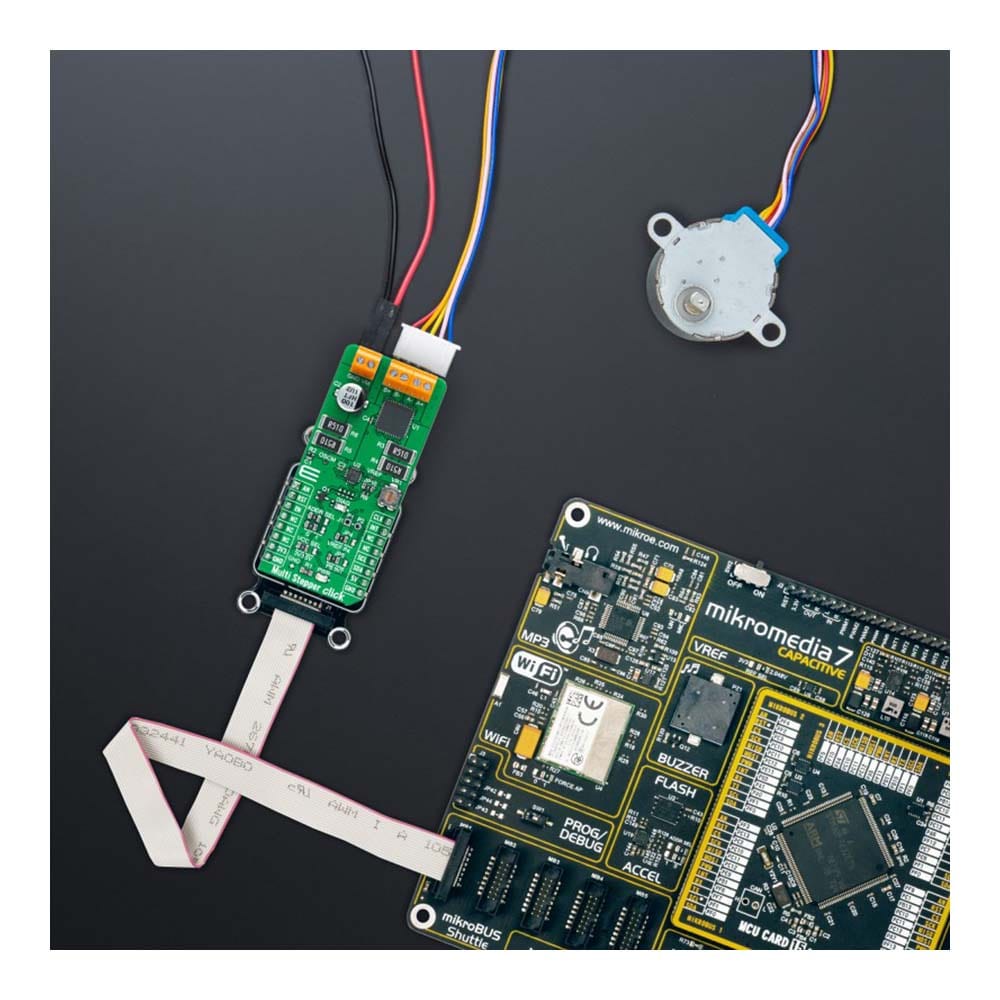
The Multi Stepper TB62262 Click Board™ is a compact add-on board that contains a bipolar stepper motor driver. This board features the TB62262FTG, CLOCK-in controlled bipolar stepping motor driver from Toshiba Semiconductor. It supports a PWM constant-current control drive and allows full-, half-, and quarter-step operation for less motor noise and smoother control. It has a wide operating voltage range of 10V to 38V with an output current capacity of 1.2A and several built-in error detection circuits. This Click board™ makes the perfect solution for stepping motors in various applications such as office automation, commercial and industrial equipment.
The Multi Stepper TB62262 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
How Does The Multi Stepper TC62262 Click Board™ Work?
The Multi Stepper TB62262 Click Board™ as its foundation uses the TB62262FTG, a two-phase bipolar stepping motor driver using a PWM chopper (customized by external resistance R2 and capacitor C1) from Toshiba Semiconductor. The TB62262FTG comes with a built-in clock-in decoder (CLOCK-in controlled), which means that each up-edge of the CLK signal, routed to the PWM pin of the mikroBUS™ socket, will shift the motor's electrical angle per step. It also incorporates a low on-resistance MOSFET output stage, which can deliver a 1.2A current with a motor output voltage rating of 38V, in addition to integrated protection mechanisms such as over-current and over-temperature detection. In addition, it allows full-, half-, and quarter-step resolution, with the help of which motor noise can be significantly reduced with smoother operation and more precise control.
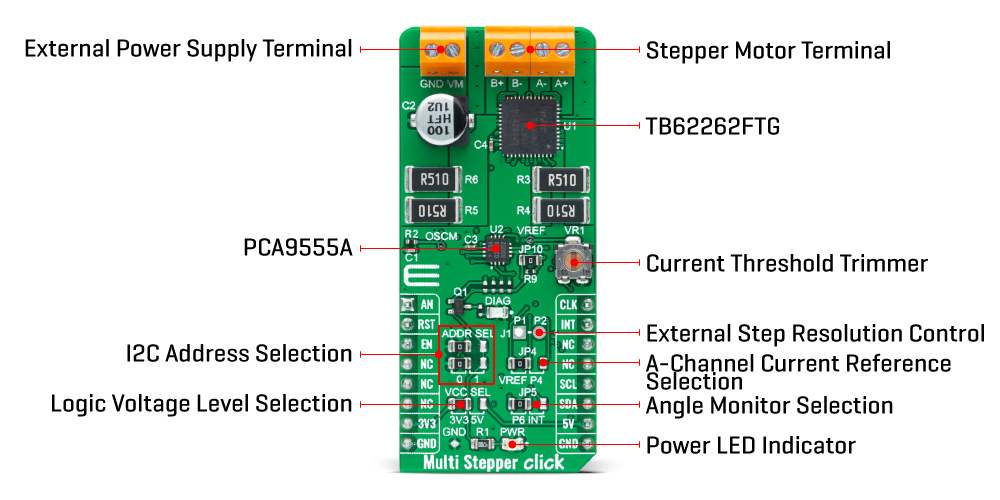
As mentioned before, the TB62262FTG supports various step resolution configurations through its control signals. These control signals are provided through the PCA9555A port expander, which establishes communication with the MCU via the I2C serial interface. This Click board™ also allows a connection of external step-resolution control signals on the onboard header J1 on pins labelled as P1 and P2 for the device's DMODE1 and DMODE2 control. The PCA9555A also allows choosing the least significant bit (LSB) of its I2C slave address by positioning SMD jumpers labelled as ADDR SEL to an appropriate position marked as 0 and 1.
The output channels current value can be set manually using an onboard trimmer labelled as VR1, which sets the reference voltage from 0V to 3.3V. The default configuration of the JP4 jumper is the VREF position that sets both channels' output current via the VR1 trimmer. In this case, avoid position P4 on a jumper JP4 since the VREFA pin requires an analog signal for setting.
Also, the Multi Stepper TC62262 Click Board™ has a Standby function, activated when step-resolution control signals are on its low logic state, used to switch to Standby mode by setting all motor control pins to a low logic state. When the Standby mode is active, the TB62262FTG stops supplying the power to the internal oscillating circuit and motor output part (the motor drive cannot be performed).
In addition to the I2C communication, several GPIO pins connected to the mikroBUS™ socket are also used. The Enable pin, labelled as EN and routed to the CS pin of the mikroBUS™ socket, optimizes power consumption used for power ON/OFF purposes. Also, a simple rotation direction function routed to the AN pin on the mikroBUS™ socket allows MCU to manage the direction of the stepper motor (clockwise or counterclockwise), while the RST pin of the mikroBUS™ socket initializes an electrical angle in the internal counter to set an initial position.
When it comes to angle monitoring, this driver has a dual way of monitoring selected by positioning SMD jumper labelled as JP5 to an appropriate position marked as P6 or INT, which choose to monitor via expander or INT pin of the mikroBUS™ socket. In the case of the selected INT position of the JP5 jumper, the JP10 jumper needs to be unpopulated. This Click board™ also has an additional LED for anomaly indication, but since this version of the stepper driver does not support this feature, this indicator cannot be used.
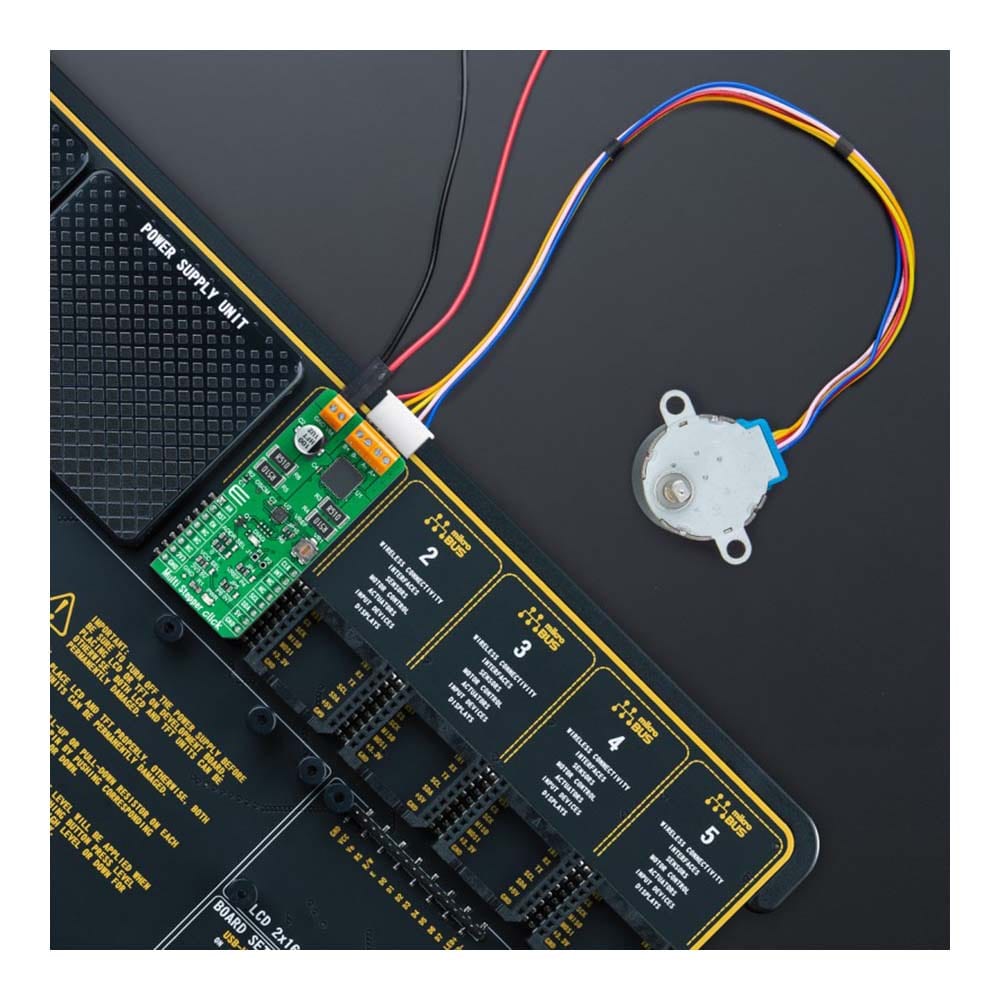
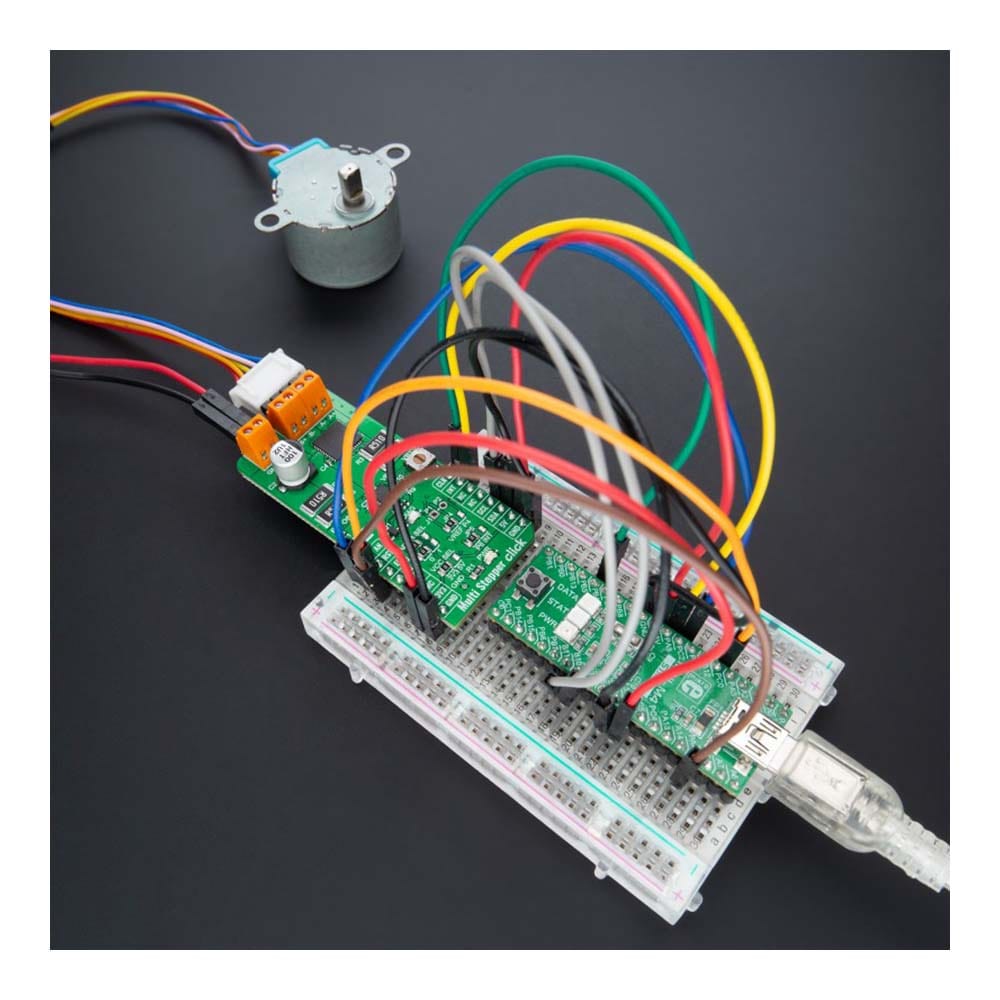
The Multi Stepper TC62262 Click Board™ supports an external power supply for the TB62262FTG, which can be connected to the input terminal labelled as VM and should be within the range of 10V to 38V, while the stepper motor coils can be connected to the terminals labelled as B+, B-, A-, and A+.
The Multi Stepper TC62262 Click Board™ can operate with both 3.3V and 5V logic voltage levels selected via the VCC SEL jumper. This way, it is allowed for both 3.3V and 5V capable MCUs to use communication lines properly. However, the Click board™ comes equipped with a library containing easy-to-use functions and an example code that can be used, as a reference, for further development.
SPECIFICATIONS
| Type | Stepper |
| Applications | Can be used for stepping motors in various applications such as office automation, commercial, and industrial equipment |
| On-board modules | TB62262FTG - CLOCK-in controlled bipolar stepping motor driver from Toshiba Semiconductor |
| Key Features | Low power consumption, capable of controlling 1 bipolar stepping motor, full-, half-, and quarter-step resolution, built-in clock decoder, integrated error detection circuits, and more |
| Interface | GPIO,I2C |
| Compatibility | mikroBUS |
| Click board size | L (57.15 x 25.4 mm) |
| Input Voltage | External,3.3V or 5V |
PINOUT DIAGRAM
This table shows how the pinout of the Multi Stepper TC62262 Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| Rotation Direction | AN | 1 | AN | PWM | 16 | CLK | Clock Signal |
| Reset | RST | 2 | RST | INT | 15 | INT | Interrupt |
| Enable | EN | 3 | CS | RX | 14 | NC | |
| NC | 4 | SCK | TX | 13 | NC | ||
| NC | 5 | MISO | SCL | 12 | SCL | I2C Clock | |
| NC | 6 | MOSI | SDA | 11 | SDA | I2C Data | |
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | 5V | Power Supply |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| LD2 | DIAG | - | LED for anomaly indication is not supported on this MCD version |
| JP1-JP2 | ADDR SEL | Left | I2C Address Selection 0/1: Left position 0, Right position 1 |
| JP3 | VCC SEL | Left | Logic Level Voltage Selection 3V3/5V: Left position 3V3, Right position 5V |
| JP4 | JP4 | Left | A-Channel Current Reference Selection VREF/P4: Left position VREF, Right position P4 |
| JP5 | JP5 | Left | Angle Monitoring Selection P6/INT: Left position P6, Right position INT |
| JP10 | JP10 | Populated | Angle Monitoring via Expander |
| J1 | J1 | Unpopulated | External Step Resolution Signals Connection Header |
| VR1 | VR1 | - | Current Threshold Trimmer |
| TP1 | VREF | - | Voltage Reference Testpoint |
| TP2 | OSCM | - | Oscillating Circuit Crequency Testpoint |
| TP3 | GND | - | Ground Testpoint |
MULTI STEPPER CLICK - TB62262 ELECTRICAL SPECIFICATIONS
| Description | Min | Typ | Max | Unit |
|---|---|---|---|---|
| Supply Voltage VCC | 3.3 | - | 5 | V |
| External Supply Voltage VM | 10 | 24 | 38 | V |
| Motor Output Current | - | 1.2 | - | A |
| Motor Output Voltage | 10 | - | 38 | V |
| Operating Temperature Range | -20 | +25 | +85 | °C |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-5037
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027389153
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.