







Mikroelektronika d.o.o.
Nano GPS 2 Click Board™
Nano GPS 2 Click Board™
SKU: MIKROE-4150
Couldn't load pickup availability



Overview
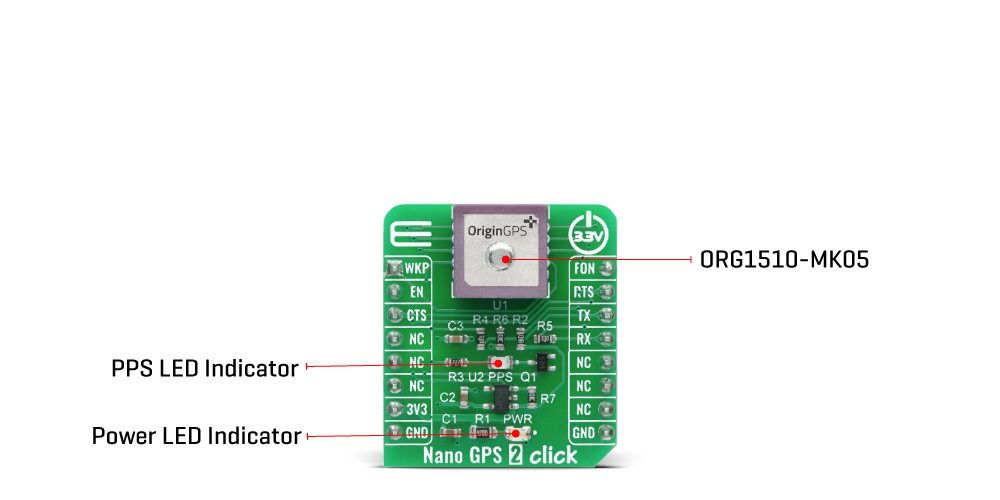
The Nano GPS 2 Click Board™ features the smallest GPS module with an integrated patch antenna, the ORG1510-MK05 a module from OriginGPS. It’s the world’s smallest multi-constellation antenna module enabling high-performance in a variety of applications. Multi Micro Hornet ORG1510-MK05 module is introducing the industry’s lowest energy per fix ratio, unparalleled accuracy, and extremely fast fixes even under challenging signal conditions, such as in built-up urban areas, dense foliage or even indoor.
Despite its size, Nano GPS 2 Click Board™ offers superior sensitivity and outstanding performance, with time to first fix (TTFF) of less than 1 second, high accuracy of less than 2.5m, and tracking sensitivity down to -165dBm.
Downloads
How Does The Nano GPS 2 Click Board™ Work?
The Nano GPS 2 Click Board™ uses the Multi Micro Hornet module from OriginGPS, the smallest GPS module with incorporated on‐board antenna element that is perfectly matched to receiver front‐end, frequency trimmed to GPS band, and Right‐Hand Circularly Polarized (RHCP). Module possesses dual-stage LNA (Low Noise Amplifier), SAW (Surface Acoustic Wave) filter, RTC crystal, GNSS SoC, and RF shield. GNSS SoC on a module is a hybrid positioning processor that combines many constellation configurations to provide a high-performance navigation solution such as GPS, GLONASS, GALILEO, BEIDOU, SBAS, QZSS, DGPS, and AGPS, allowing integration in embedded solutions with low computing resources.
The ORG1510-MK05 module supports operational modes that allow them to provide positioning information at reduced overall current consumption. The availability of GNSS signals in the operating environment will also be a factor in the choice of power management modes. The user can choose a mode that provides the best trade‐off of performance versus power consumption. Several power management modes can be enabled via a command such as:
- Full Power-Continuous Mode (for best GNSS performance)
- Power Save Mode (to optimize power consumption)
- Backup Mode (low quiescent power state where receiver operation is stopped)
Nano GPS 2 Click operates with received signal levels down to ‐167dBm and can be affected by high absolute levels of RF signals out of GNSS band, moderate levels of RF interference near the GNSS band, and by low‐levels of RF noise in GNSS band. Uses a standard UART port and besides the commonly used UART RX, TX, RTS, and CTS the Nano GPS 2 Click Board™ also has FON, and WKP pins, which are routed to the PWM and AN pins of the mikroBUS™ socket, respectively.
Integrated GPS SoC incorporating a high-performance microprocessor and sophisticated firmware keeps positioning payload off the host, allowing integration in embedded solutions with low computing resources. Innovative architecture can detect changes in context, temperature, and satellite signals to achieve a state of near-continuous availability by maintaining and opportunistically updating its internal fine time, frequency, and satellite ephemeris data while consuming mere microwatts of battery power.
The Nano GPS 2 Click Board™ is designed to be operated only with a 3.3V logic level. A proper logic voltage level conversion should be performed before the Click board™ is used with MCUs with logic levels of 5V. More information about the ORG1510-MK05 module can be found in the attached datasheet. However, this Click board™ comes equipped with a library that contains easy to use functions and a usage example that may be used as a reference for the development.
SPECIFICATIONS
| Type | GPS+GNSS |
| Applications | Can be used for a rapid development and testing of various applications based on asset tracking, road navigation devices, public transport, wearable devices, etc. |
| On-board modules | The Nano GPS 2 Click Board™ uses the Multi Micro Hornet ORG1510-MK05 module |
| Key Features | Superior sensitivity and outstanding performance, with time to first fix (TTFF) of less than 1 second, high accuracy of less than 2.5m, and tracking sensitivity down to -165dBm |
| Interface | GPIO,UART |
| Compatibility | mikroBUS |
| Click board size | S (28.6 x 25.4 mm) |
| Input Voltage | 3.3V |
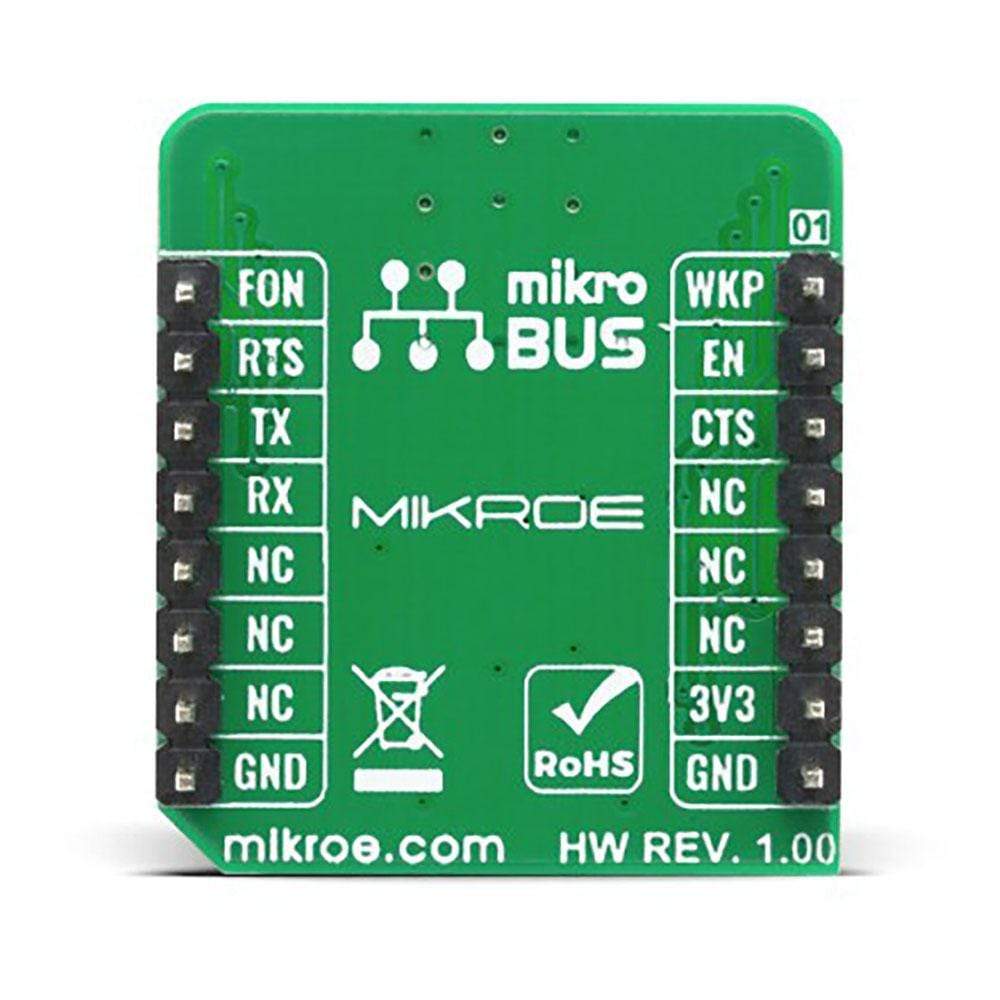
PINOUT DIAGRAM
This table shows how the pinout of the Nano GPS 2 Click Board™ corresponds to the pinout on the mikroBUS™ socket (the latter shown in the two middle columns).
| Notes | Pin | Pin | Notes | ||||
|---|---|---|---|---|---|---|---|
| Wake Up | WKP | 1 | AN | PWM | 16 | FON | Force Enable |
| Enable Module | EN | 2 | RST | INT | 15 | RTS | UART RTS |
| UART CTS | CS | 3 | CS | RX | 14 | TX | UART TX |
| NC | 4 | SCK | TX | 13 | RX | UART RX | |
| NC | 5 | MISO | SCL | 12 | NC | ||
| NC | 6 | MOSI | SDA | 11 | NC | ||
| Power Supply | 3.3V | 7 | 3.3V | 5V | 10 | NC | |
| Ground | GND | 8 | GND | GND | 9 | GND | Ground |
ONBOARD SETTINGS AND INDICATORS
| Label | Name | Default | Description |
|---|---|---|---|
| LD1 | PWR | - | Power LED Indicator |
| LD2 | PPS | - | Pulse Per Second, when the GNSS receiver has established a connection with the satellite constellation the LED starts blinking |
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4150
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606018717866
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.