



Mikroelektronika d.o.o.
Vibro Motor 4 Click-Platine
Vibro Motor 4 Click-Platine
SKU: MIKROE-4825
Verfügbarkeit für Abholungen konnte nicht geladen werden



Overview
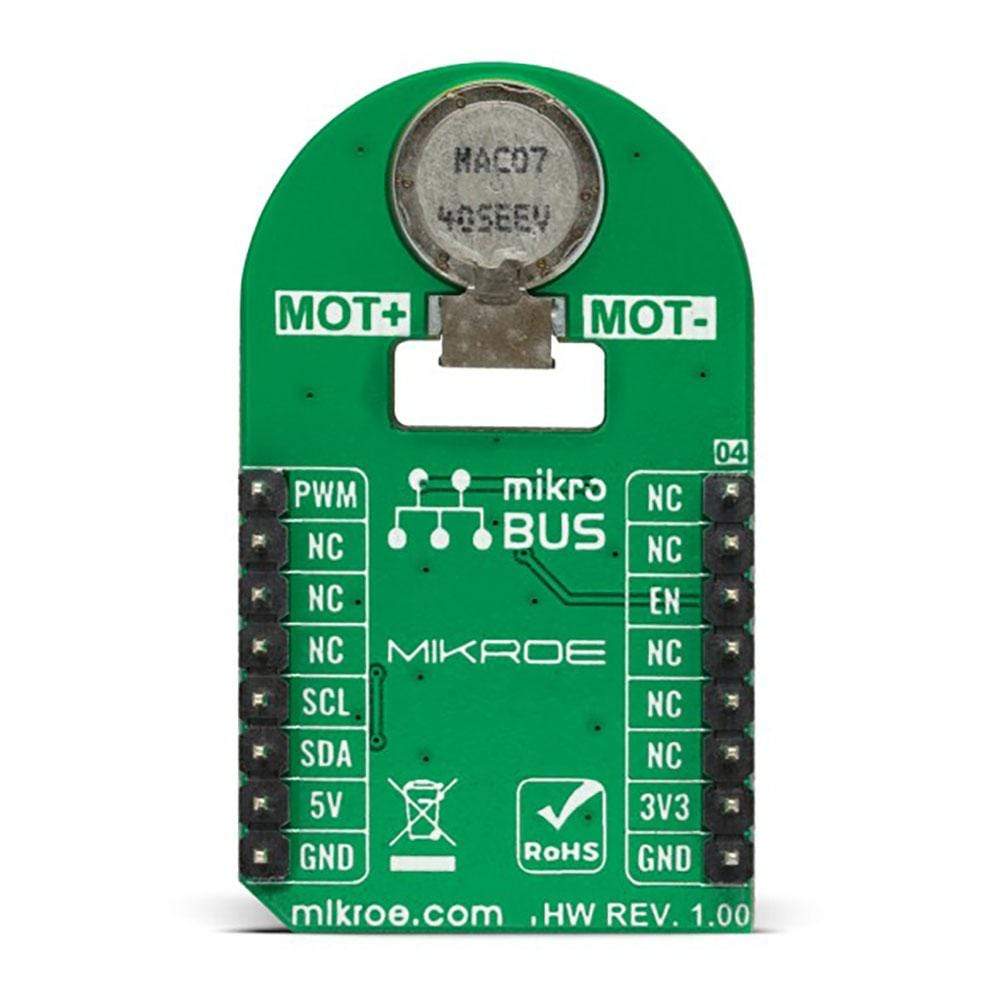
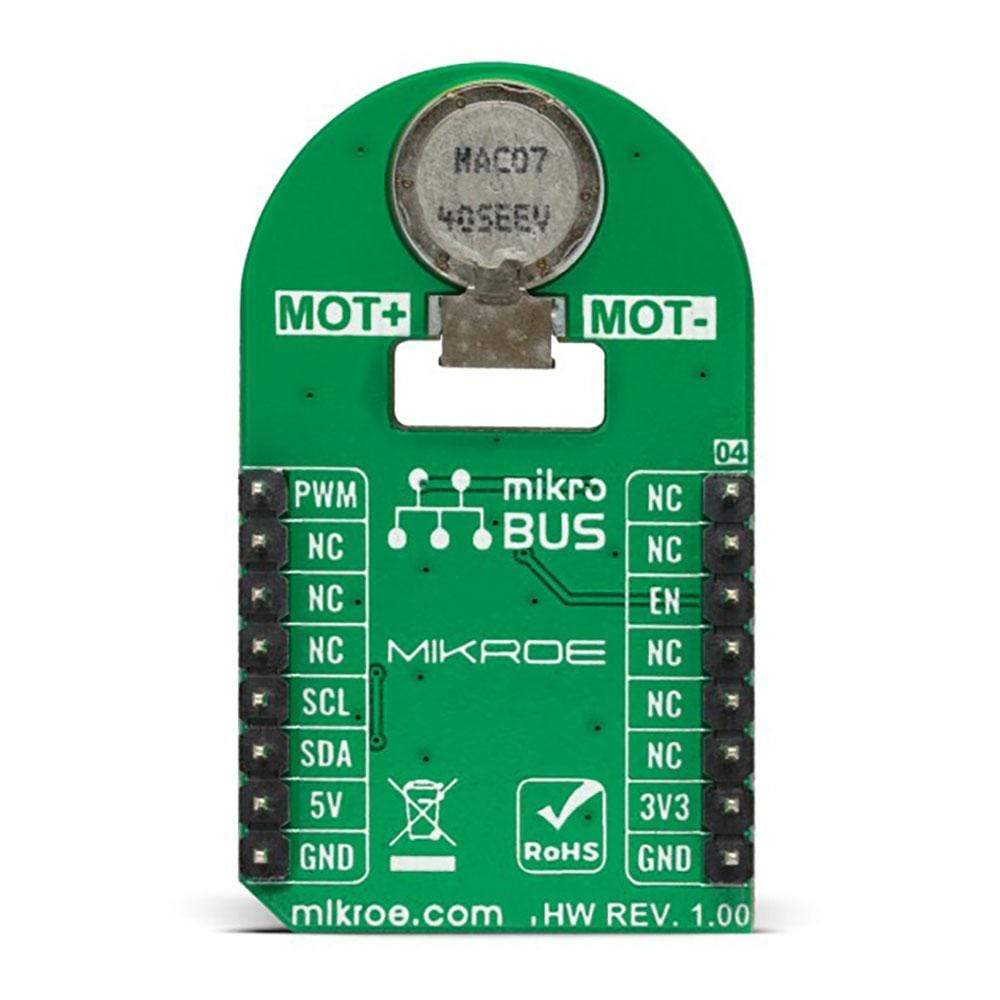
The Vibro Motor 4 Click Board™ is a compact add-on board that makes an ideal solution for adding simple haptic feedback in any design. This board features the G1040003D, a coin-sized linear resonant actuator (LRA) that generates vibration/haptic feedback from Jinlong Machinery & Electronics, Inc. Driven by a flexible Haptic/Vibra driver, the DRV2605, G1040003D vibrates in the Z-axis, which is perpendicular to the face of the vibration motor. It draws a maximum of 170mA while producing the highest G force/vibration energy of 2 GRMS.
The Vibro Motor 4 Click Board™ makes an excellent choice for devices with limited battery capacity and for users who require crisp haptic feedback and low power consumption.
Downloads
Der Vibro Motor 4 Click Board™ ist eine kompakte Zusatzplatine, die eine ideale Lösung zum Hinzufügen einfacher haptischer Rückmeldungen in jedes Design darstellt. Diese Platine enthält den G1040003D, einen münzgroßen linearen Resonanzaktuator (LRA), der Vibrations-/haptische Rückmeldungen von Jinlong Machinery & Electronics, Inc. erzeugt. Angetrieben von einem flexiblen haptischen/Vibra-Treiber vibriert der DRV2605, G1040003D in der Z-Achse, die senkrecht zur Oberfläche des Vibrationsmotors steht. Er zieht maximal 170 mA und erzeugt dabei die höchste G-Kraft/Vibrationsenergie von 2 GRMS.
Der Vibro Motor 4 Click Board™ ist eine ausgezeichnete Wahl für Geräte mit begrenzter Akkukapazität und für Benutzer, die ein klares haptisches Feedback und einen geringen Stromverbrauch benötigen.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4825
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027383823
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.