





Mikroelektronika d.o.o.
Bürstenloses 14 Click Board
Bürstenloses 14 Click Board
SKU: MIKROE-4648
Verfügbarkeit für Abholungen konnte nicht geladen werden





Overview
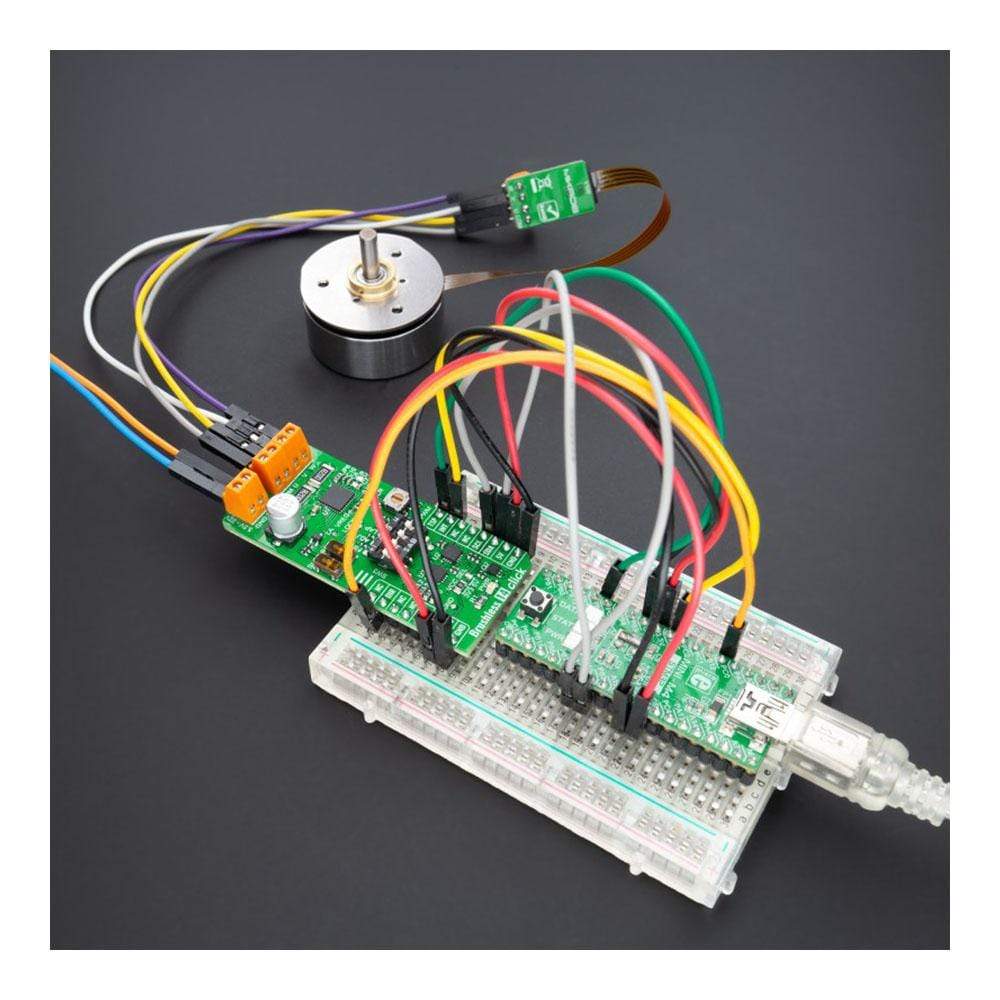
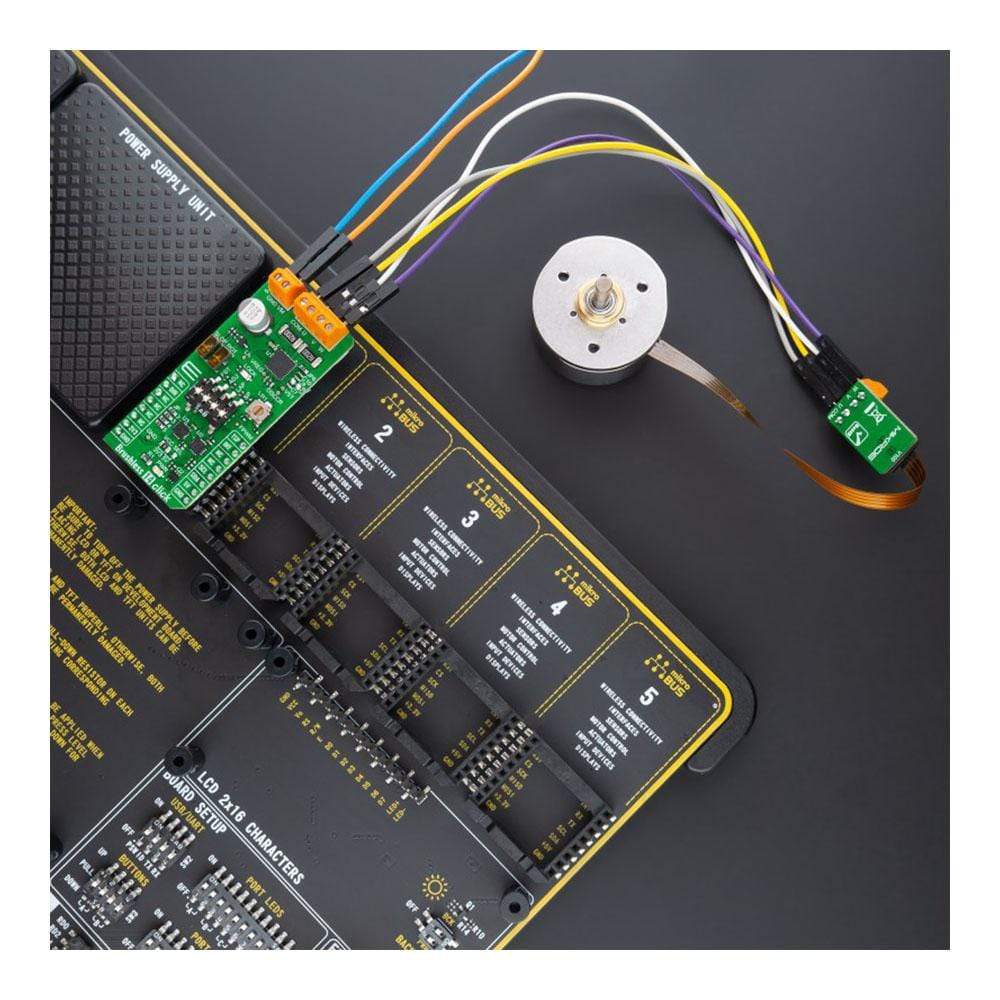
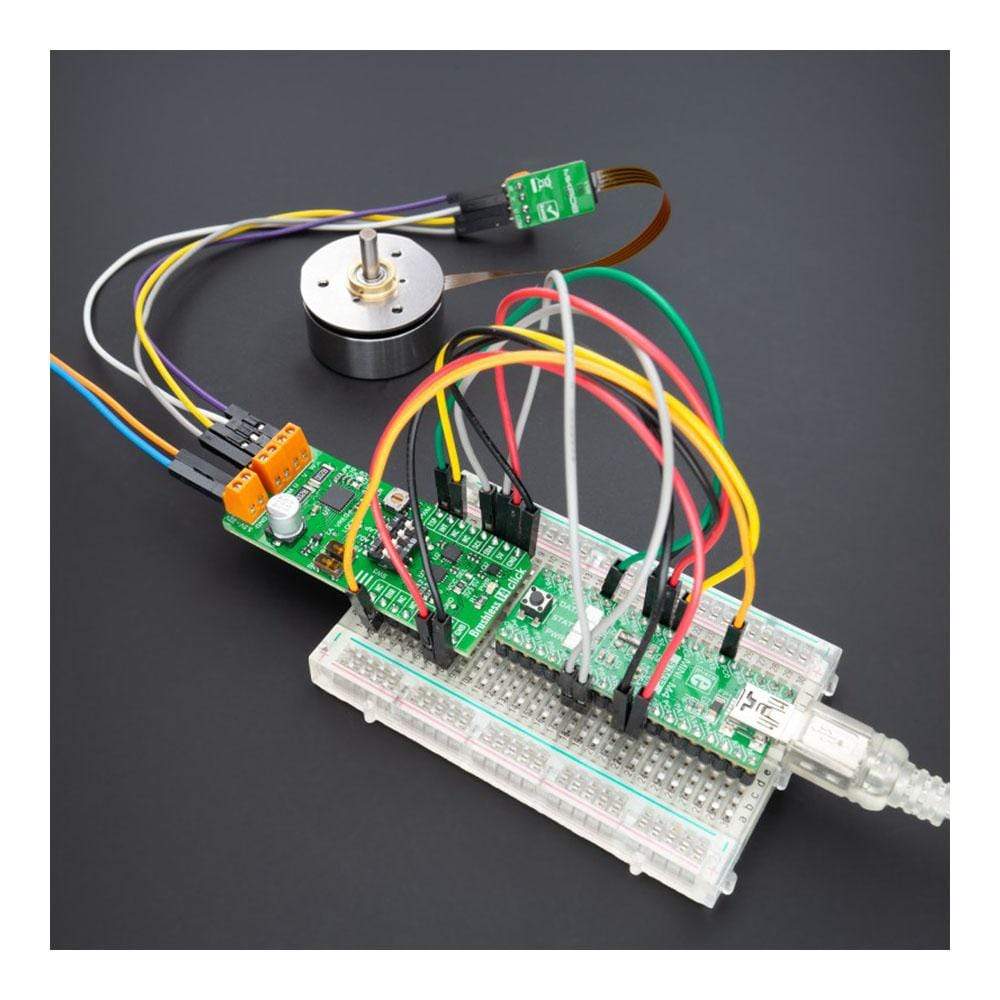
The Brushless 14 Click Board™ is a compact add-on board suitable for controlling BLDC motors with any MCU. This board features the TB67B001FTG, a three-phase, brushless, Hall sensorless driver IC from Toshiba Semiconductor. It comes with a 150-degree wide-angle commutation drive, contributing to lower vibration and motor noise, while a rotation speed up to 30,000rpm (rotations per minute when a 4-pole motor is used) can be achieved through a high-speed PWM and improved cooling.
This Brushless 14 Click Board™ makes the perfect solution for delivering quiet, cool operation to home appliances and office automation equipment.
Downloads
Der Bürstenloses 14 Click Board™ ist eine kompakte Zusatzplatine, die sich zur Steuerung von BLDC-Motoren mit jedem MCU eignet. Diese Platine verfügt über den TB67B001FTG, einen dreiphasigen, bürstenlosen, Hall-sensorlosen Treiber-IC von Toshiba Semiconductor. Er verfügt über einen 150-Grad-Weitwinkel-Kommutierungsantrieb, der zu geringeren Vibrationen und Motorgeräuschen beiträgt, während durch ein Hochgeschwindigkeits-PWM und verbesserte Kühlung eine Drehzahl von bis zu 30.000 U/min (Umdrehungen pro Minute bei Verwendung eines 4-poligen Motors) erreicht werden kann.
Dieses bürstenlose 14 Click Board™ ist die perfekte Lösung für den leisen, kühlen Betrieb von Haushaltsgeräten und Büroautomatisierungsgeräten.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4648
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027383328
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.