




Mikroelektronika d.o.o.
CAN-Bus-Click-Platine
CAN-Bus-Click-Platine
SKU: MIKROE-4640
Verfügbarkeit für Abholungen konnte nicht geladen werden




Key Features
Overview
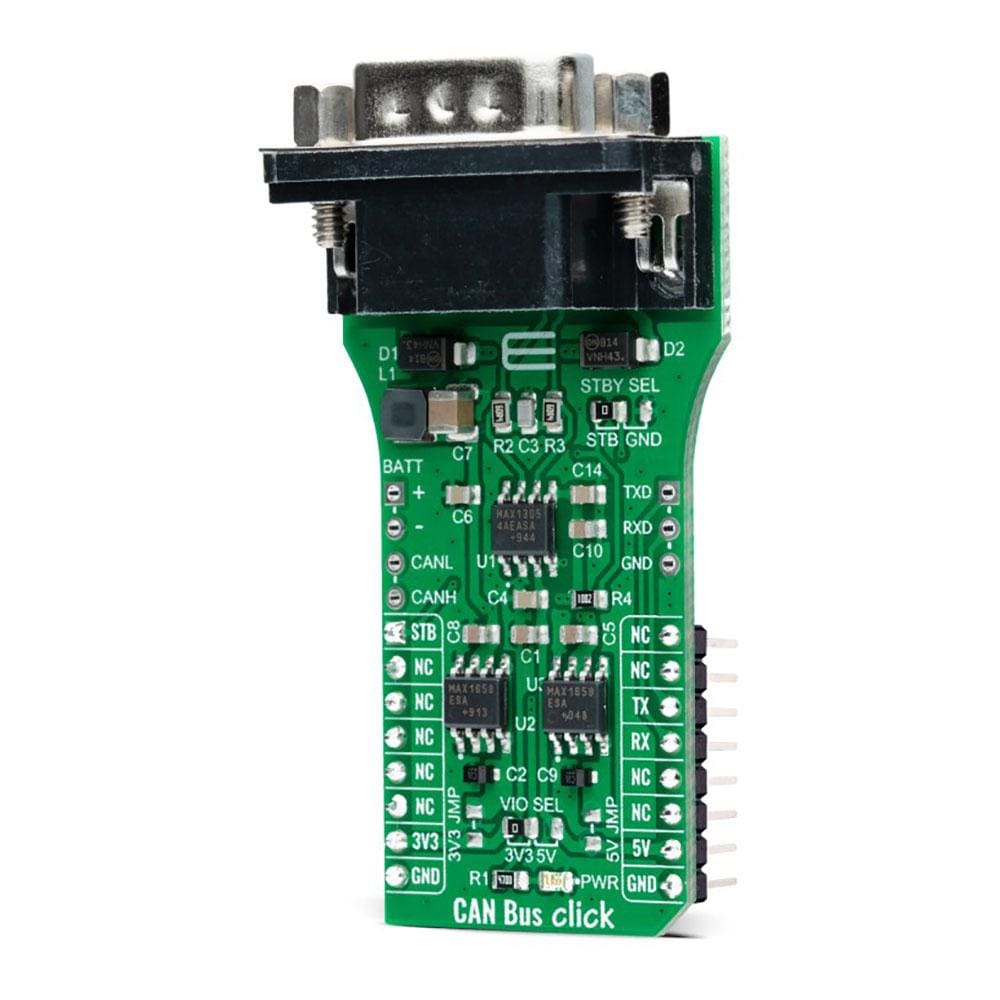
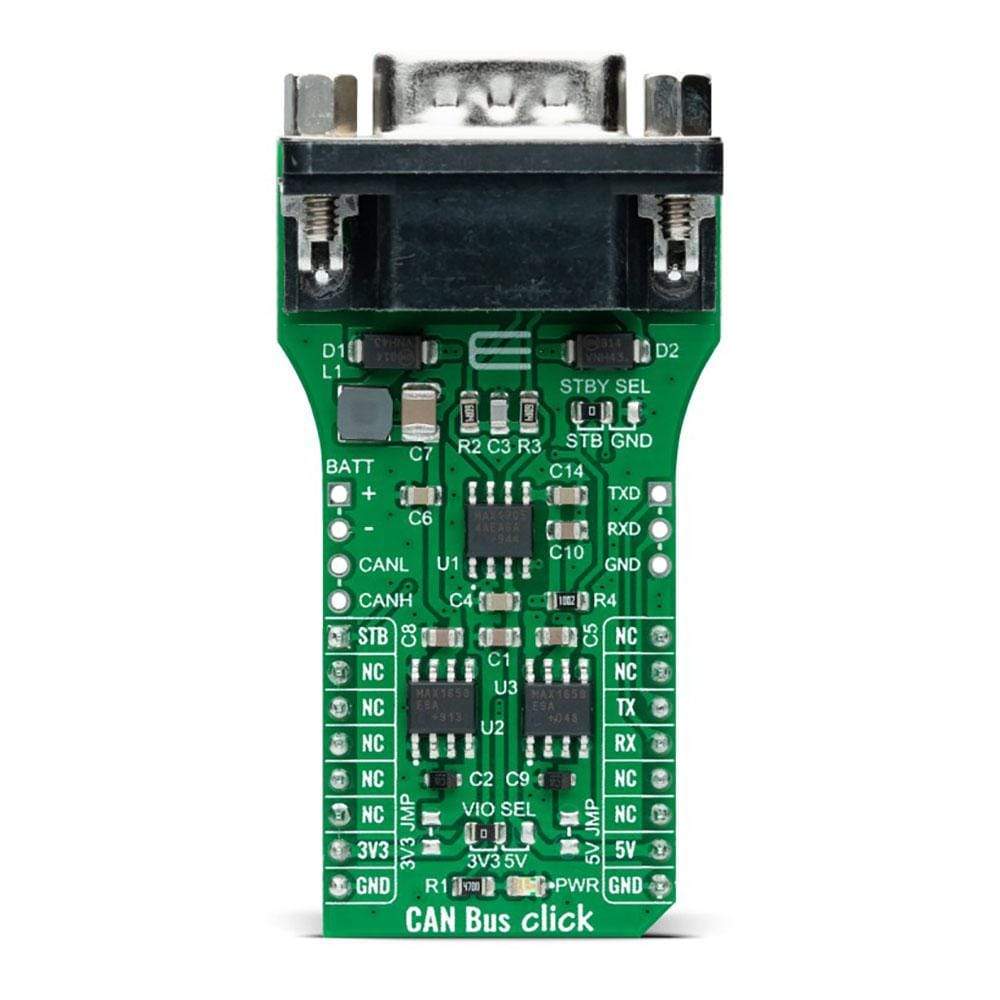
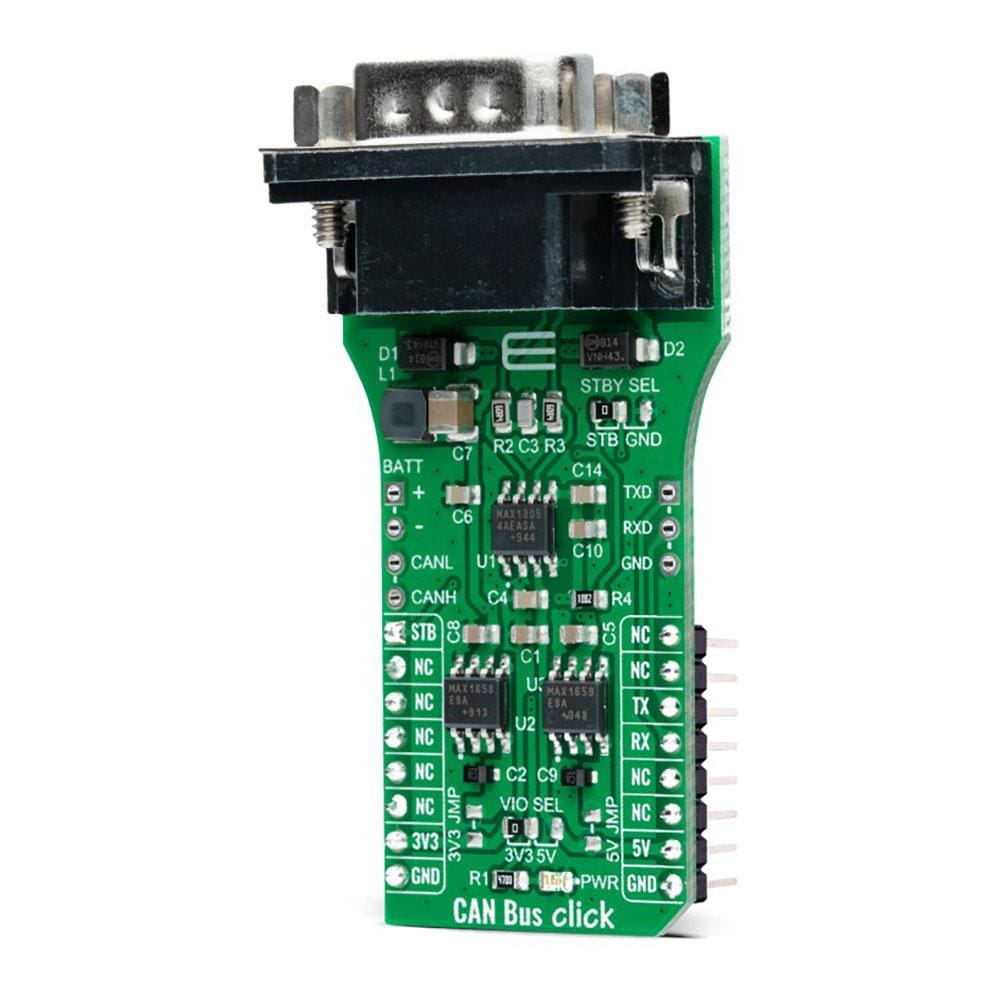
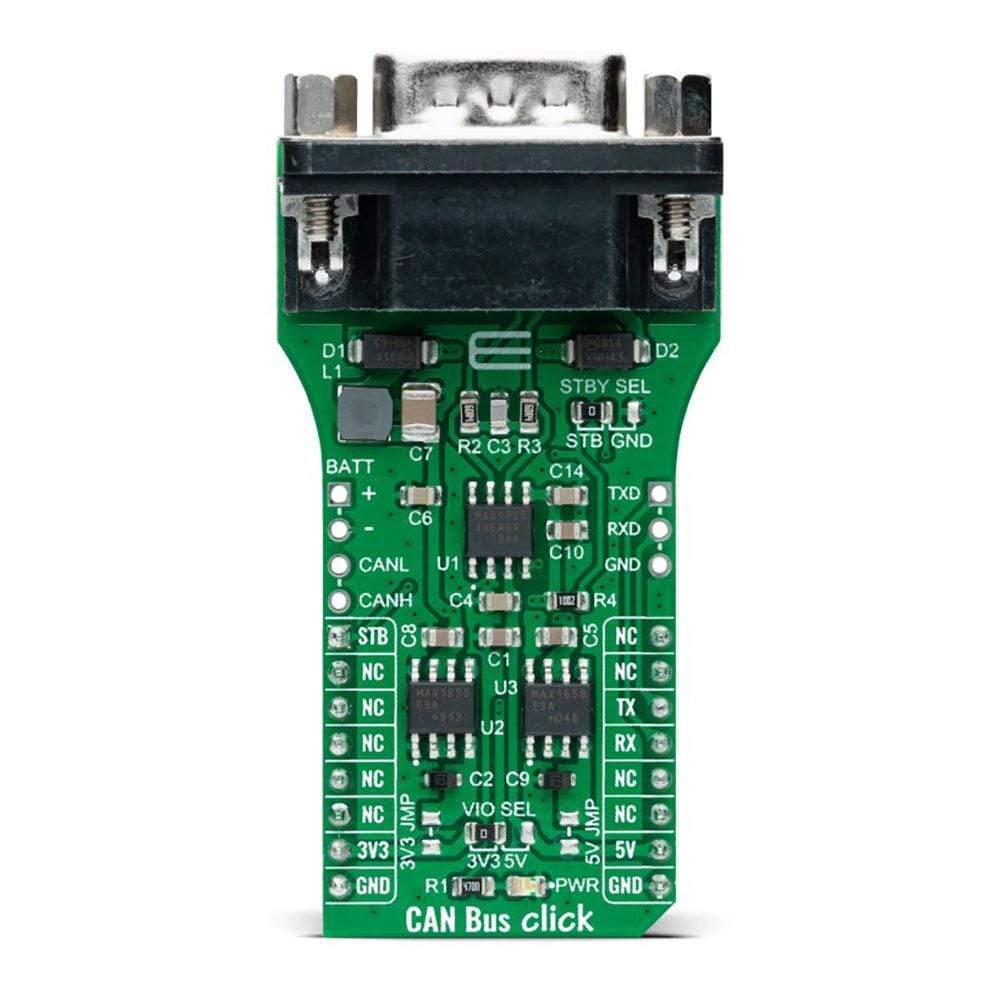
The CAN Bus Click Board™ is a compact add-on board that provides a link between the CAN protocol controller and the physical wires of the bus lines in a control area network (CAN). This board features the MAX13054, an industry-standard, high-speed CAN transceiver with extended ±80V fault protection from Maxim Integrated. The CAN transceiver has an input common-mode range greater than ±12V with data rates up to 1Mbps, exceeding the ISO11898 specification of -2V to +7V, and feature ±8kV ESD protection. It also comes with a Standby feature that shuts off the transmitter and switches the receiver to a low-current/low-speed state.
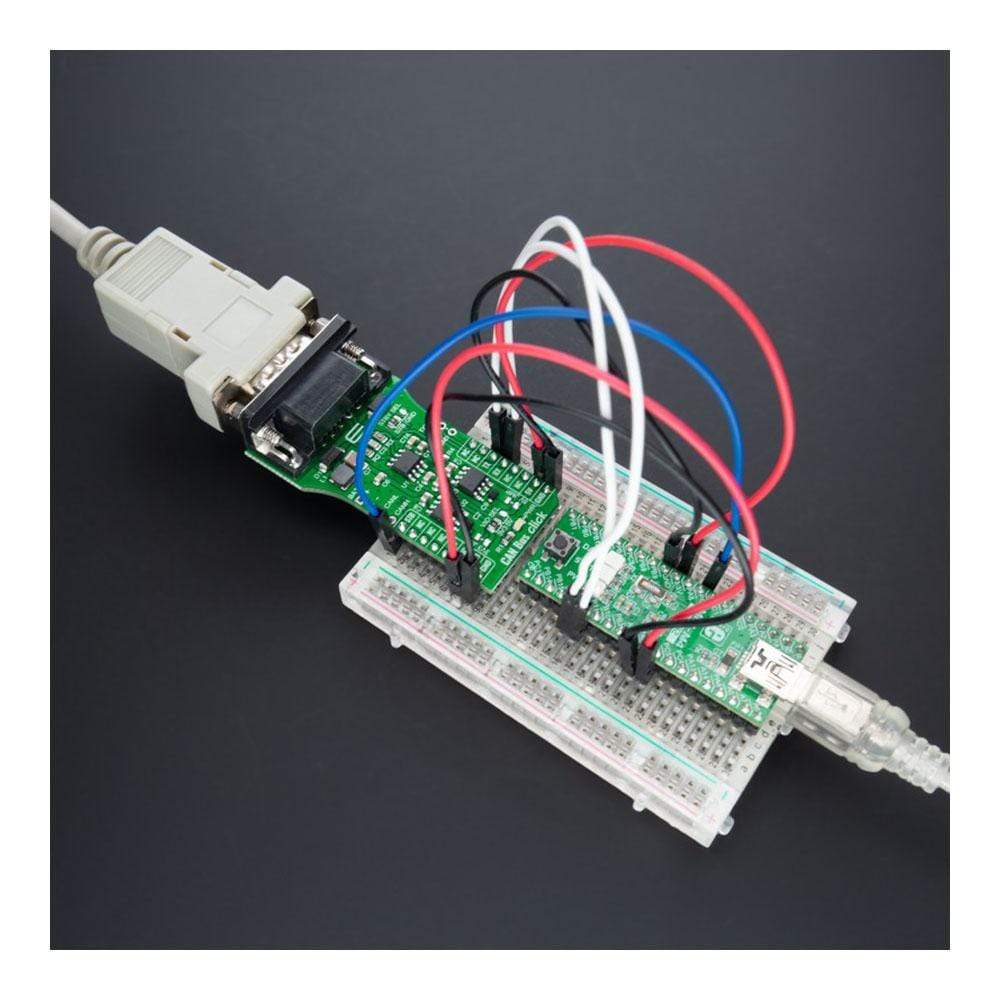
The CAN Bus Click Board™ is suitable for harsh industrial environments and industrial network applications where overvoltage protection is required.
Downloads
Das CAN Bus Click Board™ ist eine kompakte Zusatzplatine, die eine Verbindung zwischen dem CAN-Protokollcontroller und den physischen Drähten der Busleitungen in einem Control Area Network (CAN) herstellt. Diese Platine verfügt über den MAX13054, einen Industriestandard-Hochgeschwindigkeits-CAN-Transceiver mit erweitertem ±80-V-Fehlerschutz von Maxim Integrated. Der CAN-Transceiver hat einen Eingangs-Gleichtaktbereich von über ±12 V mit Datenraten von bis zu 1 Mbit/s, übertrifft die ISO11898-Spezifikation von -2 V bis +7 V und verfügt über ±8 kV ESD-Schutz. Er verfügt außerdem über eine Standby-Funktion, die den Sender abschaltet und den Empfänger in einen Niedrigstrom-/Niedriggeschwindigkeitszustand versetzt.
Das CAN Bus Click Board™ eignet sich für raue Industrieumgebungen und industrielle Netzwerkanwendungen, bei denen Überspannungsschutz erforderlich ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4640
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027382796
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.