







Mikroelektronika d.o.o.
Schrittmotor 15 Click-Platine
Schrittmotor 15 Click-Platine
SKU: MIKROE-4639
Verfügbarkeit für Abholungen konnte nicht geladen werden




Overview
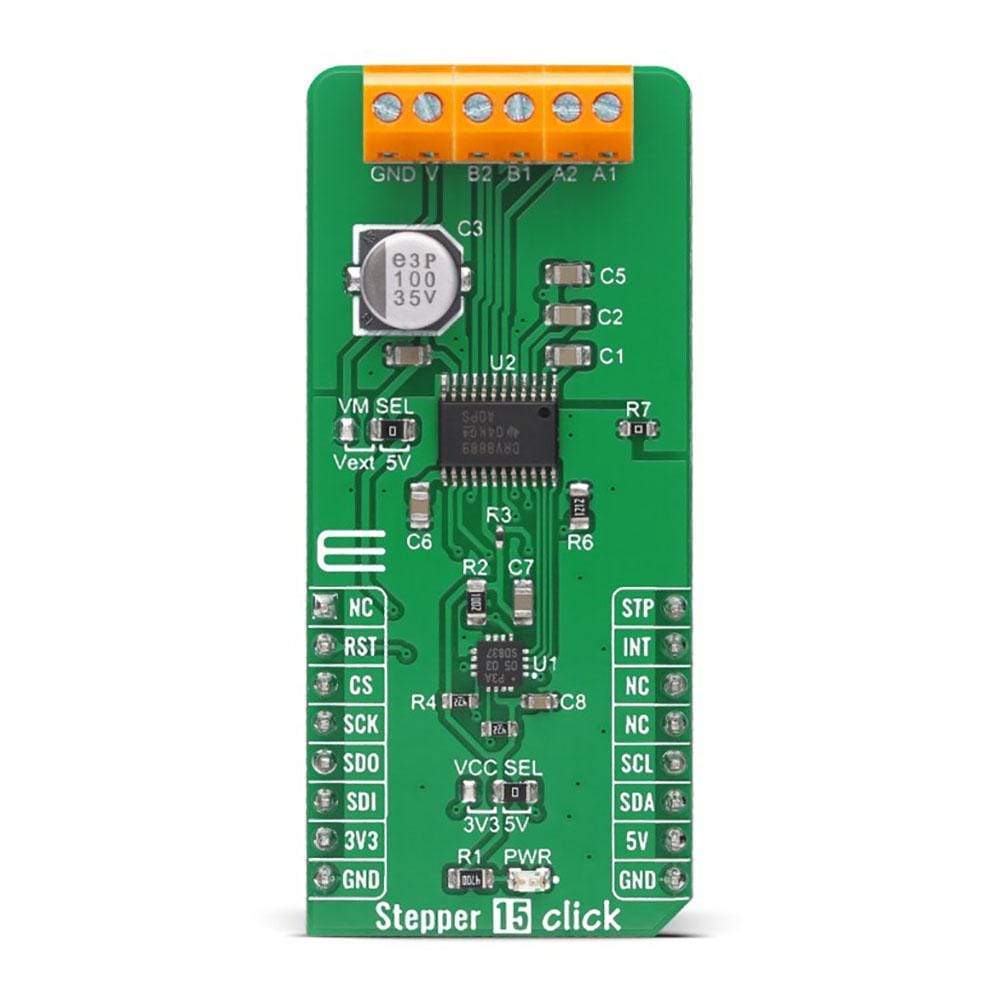
The Stepper 15 Click Board™ is a compact add-on board that contains a bipolar stepper motor driver. This board features the DRV8889A, an automotive stepper driver with integrated current sense and stall detection from Texas Instruments. It supports up to 1.5A full-scale current with an internal microstepping indexer, smart tune decay technology, advanced stall detection algorithm, and integrated current sensing, eliminating the need for power sense resistors. With a simple STEP/DIR interface, the device supports up to 1/256 levels of microstepping to enable a smooth motion profile. Also, an advanced stall detection algorithm allows users to detect if the motor stopped and take action as needed, improving efficiency and reducing noise. This Click Board™ is suitable for driving motors in any application that demands a precise and safe step motor driver.
The Stepper 15 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a thoroughly tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Der Stepper 15 Click Board™ ist eine kompakte Zusatzplatine, die einen bipolaren Schrittmotortreiber enthält. Diese Platine verfügt über den DRV8889A, einen Automobil-Schrittmotortreiber mit integrierter Strommessung und Blockiererkennung von Texas Instruments. Es unterstützt bis zu 1,5 A Vollstrom mit einem internen Mikroschritt-Indexer, Smart-Tune-Decay-Technologie, erweitertem Blockiererkennungsalgorithmus und integrierter Strommessung, wodurch die Notwendigkeit von Strommesswiderständen entfällt. Mit einer einfachen STEP/DIR-Schnittstelle unterstützt das Gerät bis zu 1/256 Mikroschrittstufen, um ein gleichmäßiges Bewegungsprofil zu ermöglichen. Außerdem ermöglicht ein erweiterter Blockiererkennungsalgorithmus dem Benutzer, zu erkennen, ob der Motor angehalten hat, und bei Bedarf Maßnahmen zu ergreifen, um die Effizienz zu verbessern und Lärm zu reduzieren. Dieses Click Board™ eignet sich zum Antrieb von Motoren in allen Anwendungen, die einen präzisen und sicheren Schrittmotortreiber erfordern.
Das Stepper 15 Click Board™ wird durch eine mikroSDK-kompatible Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ ist ein gründlich getestetes Produkt und kann auf einem System verwendet werden, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4639
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027382543
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.