




Mikroelektronika d.o.o.
CAN FD 6 Click-Platine
CAN FD 6 Click-Platine
SKU: MIKROE-4572
Verfügbarkeit für Abholungen konnte nicht geladen werden




Key Features
Overview
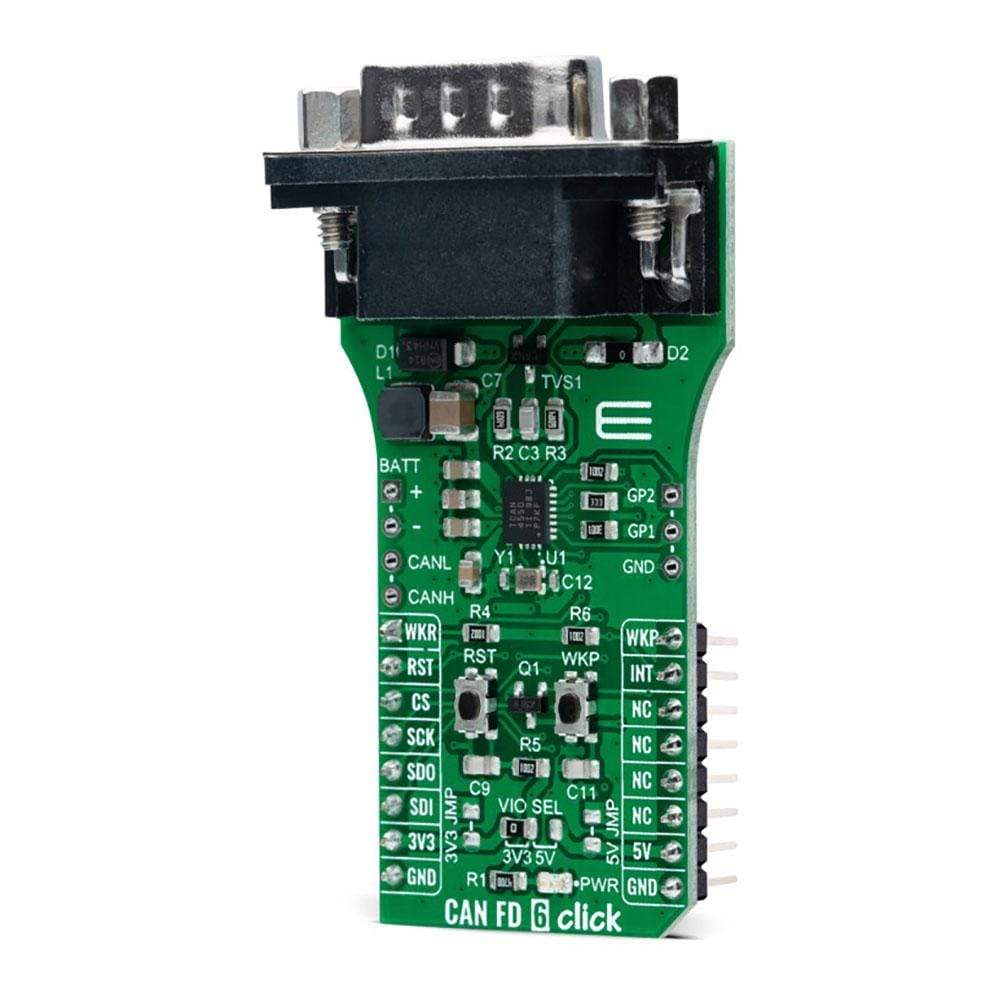
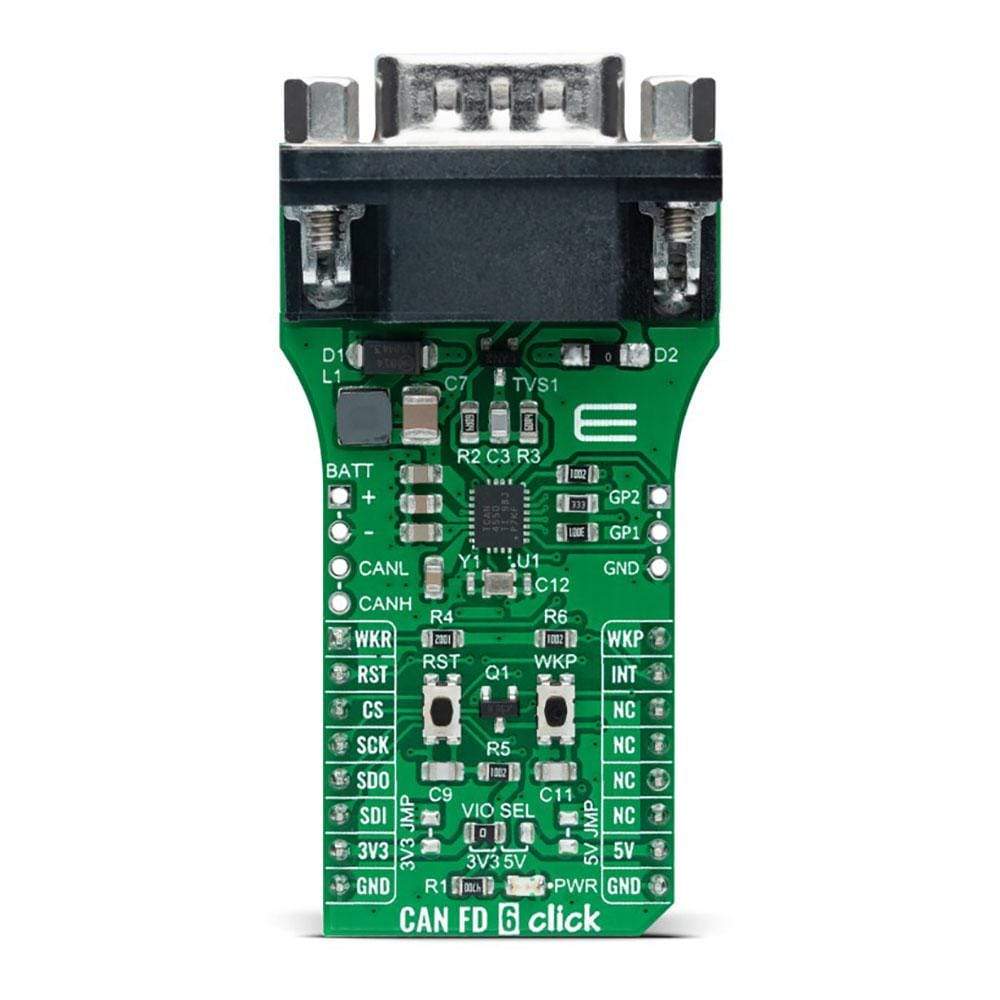
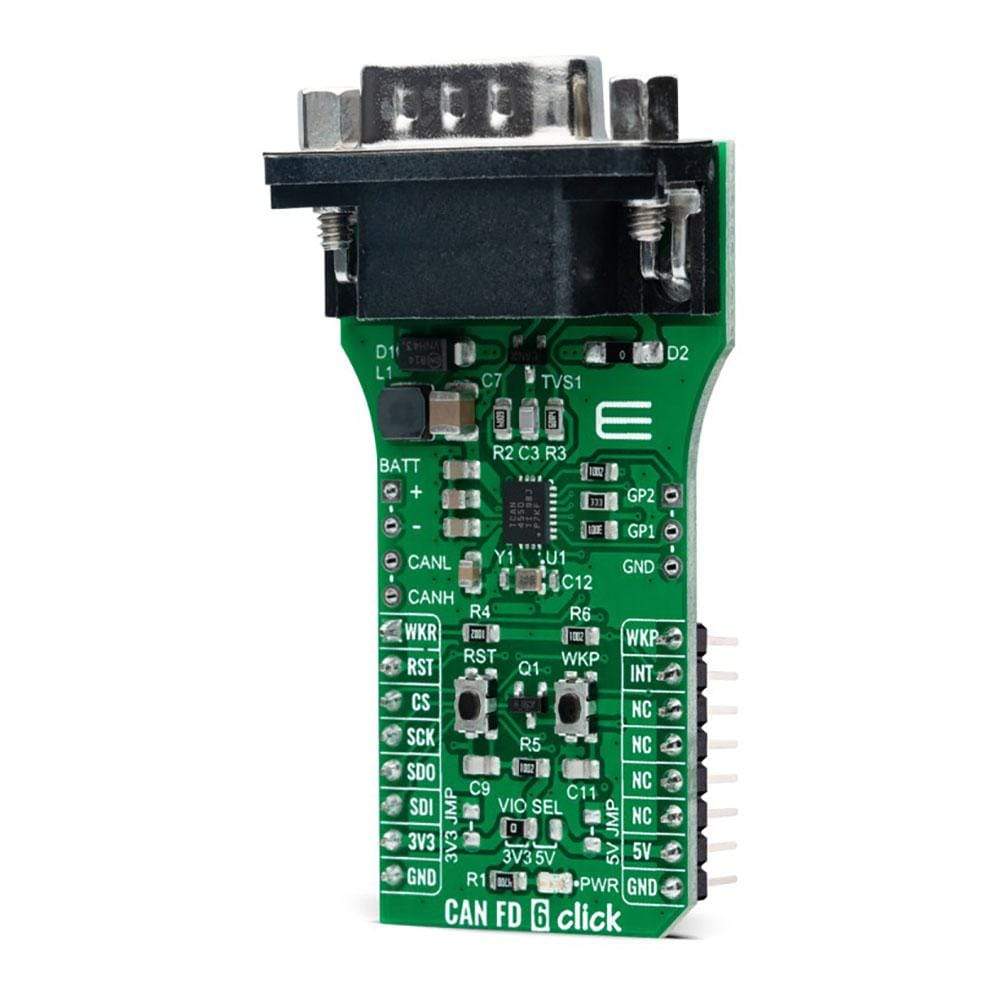
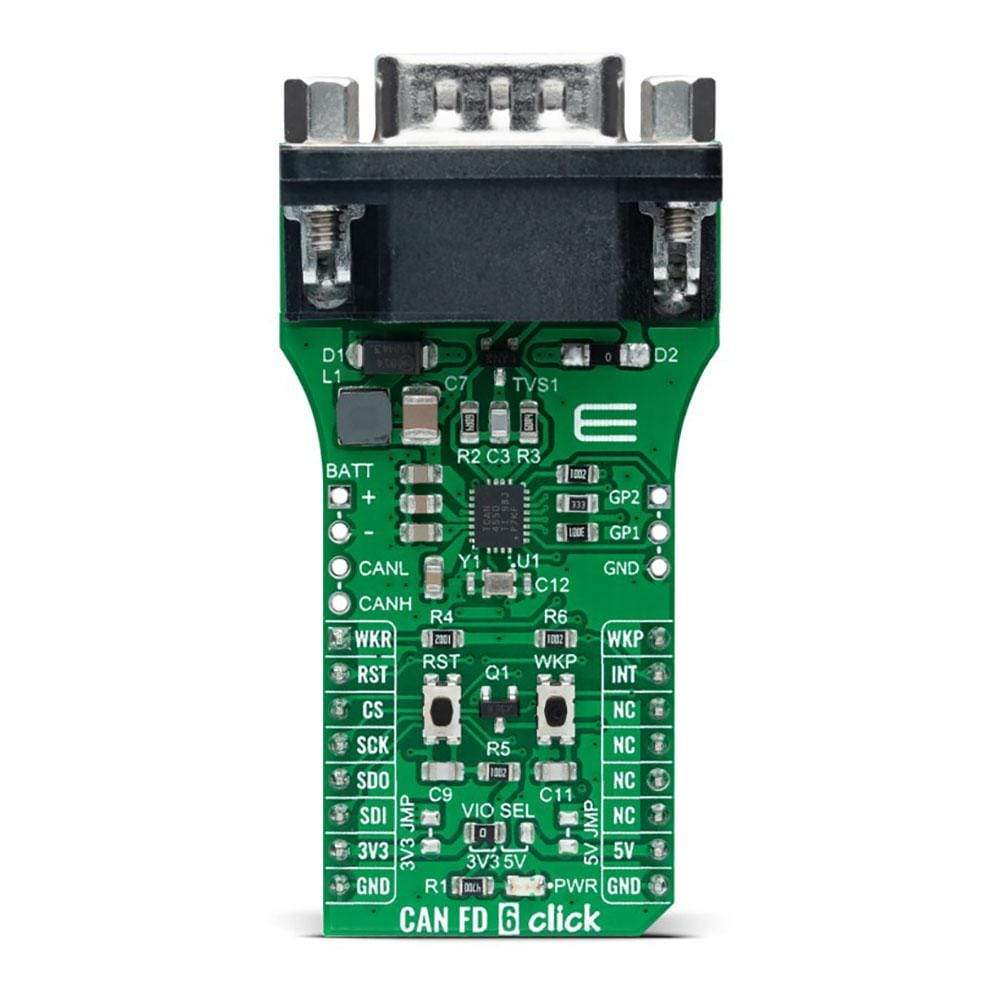
Enhance your automotive and industrial applications with the CAN FD 6 Click Board™. This compact add-on board integrates a high-performance CAN transceiver supporting Controller Area Network (CAN) and Controller Area Network Flexible Data-Rate (CAN FD) protocols. Developed with the TCAN4550 CAN FD controller from Texas Instruments, this board enables data rates of up to 5 megabits per second (Mbps).
The CAN FD 6 Click Board™ offers high-bandwidth capabilities and data-rate flexibility, bridging the gap between the CAN bus and the system processor seamlessly through an SPI interface. It not only supports classical CAN and CAN FD but also features wake-up functionality, allowing for local and bus wake using the CAN bus.
- High-speed CAN networking made easy for automotive and industrial settings.
- Low-power mode with wake-up capabilities via the CAN bus ensures efficient energy consumption.
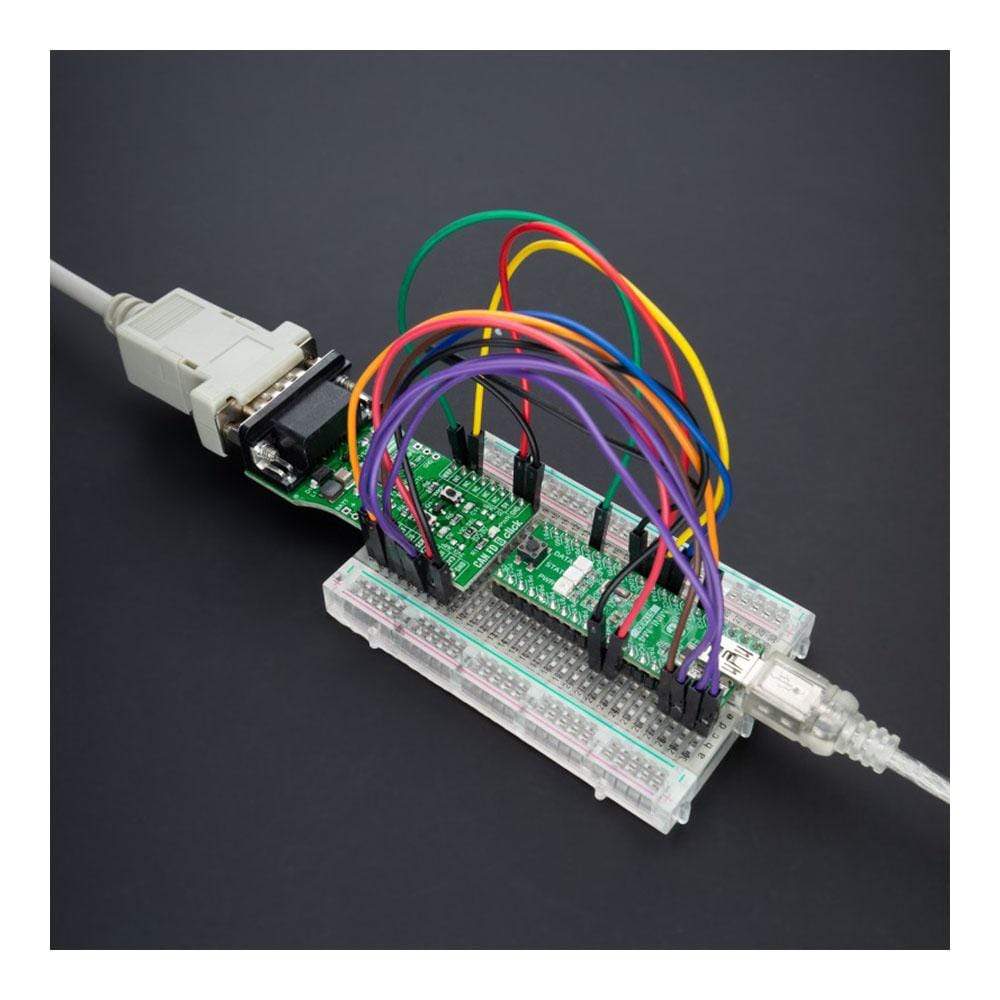
This Click Board™ is the perfect solution for applications where reliable high-speed communication is essential combined with a need for power efficiency. Additionally, the board is supported by a mikroSDK compliant library, providing developers with simplified software development functions.
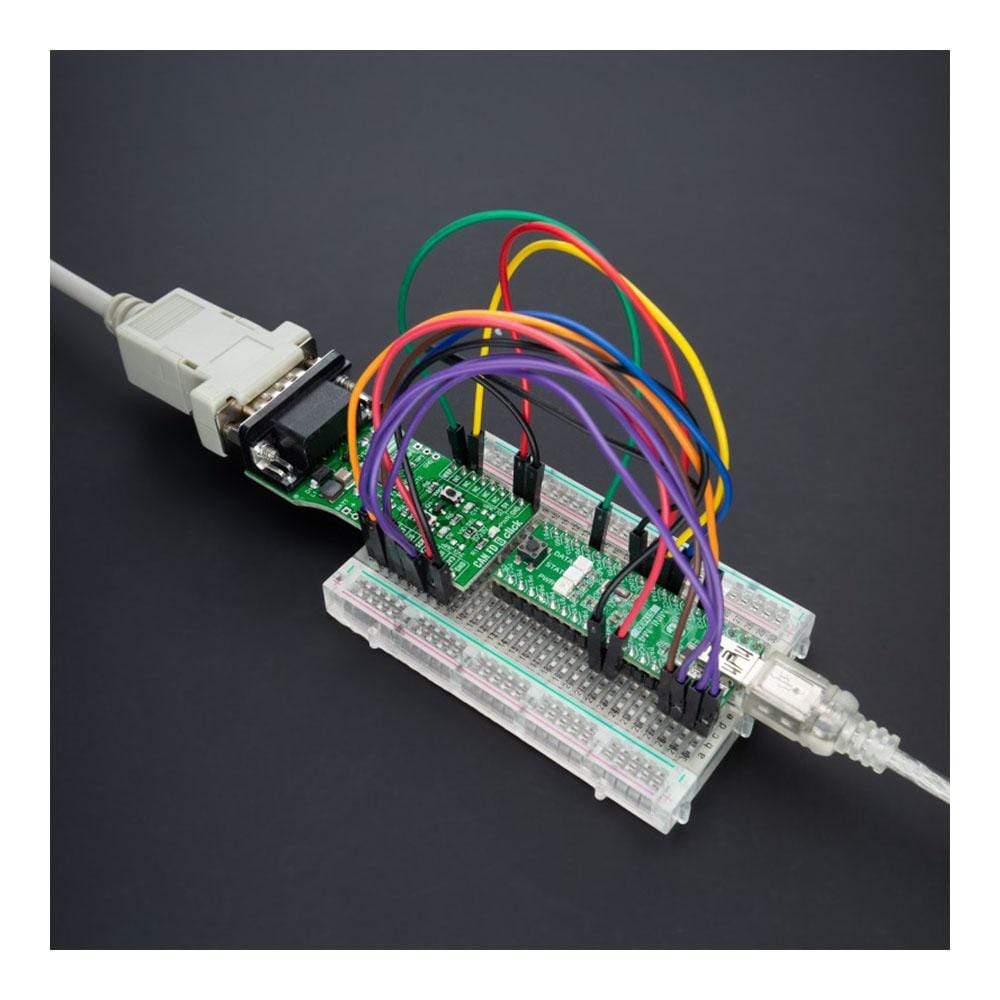
Tested thoroughly to ensure reliability, the CAN FD 6 Click Board™ is ready to be integrated into systems equipped with a mikroBUS™ socket. Experience seamless data transfer and efficient power management with this advanced add-on board.
Downloads
Verbessern Sie Ihre Automobil- und Industrieanwendungen mit dem CAN FD 6 Click Board™. Diese kompakte Zusatzplatine integriert einen leistungsstarken CAN-Transceiver, der die Protokolle Controller Area Network (CAN) und Controller Area Network Flexible Data-Rate (CAN FD) unterstützt. Diese Platine wurde mit dem TCAN4550 CAN FD-Controller von Texas Instruments entwickelt und ermöglicht Datenraten von bis zu 5 Megabit pro Sekunde (Mbps).
Das CAN FD 6 Click Board™ bietet hohe Bandbreiten und Datenratenflexibilität und überbrückt die Lücke zwischen dem CAN-Bus und dem Systemprozessor nahtlos über eine SPI-Schnittstelle. Es unterstützt nicht nur klassisches CAN und CAN FD, sondern verfügt auch über eine Wake-up-Funktion, die lokales und Bus-Wake über den CAN-Bus ermöglicht.
- Hochgeschwindigkeits-CAN-Netzwerke leicht gemacht für den Automobil- und Industriebereich.
- Der Low-Power-Modus mit Weckfunktion über den CAN-Bus sorgt für einen effizienten Energieverbrauch.
Dieses Click Board™ ist die perfekte Lösung für Anwendungen, bei denen zuverlässige Hochgeschwindigkeitskommunikation und gleichzeitig Energieeffizienz unverzichtbar sind. Darüber hinaus wird das Board von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Entwicklern vereinfachte Softwareentwicklungsfunktionen bietet.
Das CAN FD 6 Click Board™ wurde gründlich auf Zuverlässigkeit getestet und kann in Systeme integriert werden, die mit einer mikroBUS™-Buchse ausgestattet sind. Erleben Sie nahtlose Datenübertragung und effizientes Energiemanagement mit dieser fortschrittlichen Zusatzplatine.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4572
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
5055383601196
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.