







Mikroelektronika d.o.o.
DC-Motor 15 Click-Platine
DC-Motor 15 Click-Platine
SKU: MIKROE-4334
Verfügbarkeit für Abholungen konnte nicht geladen werden





Overview
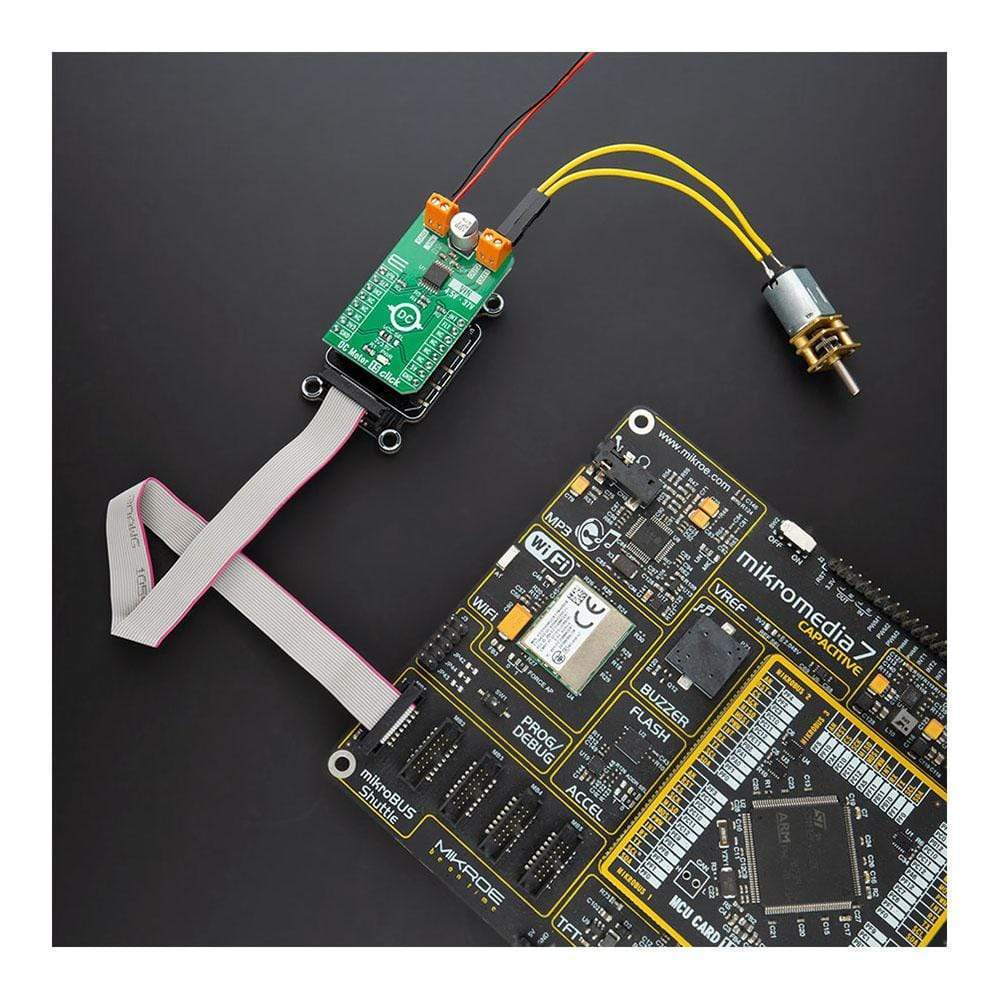
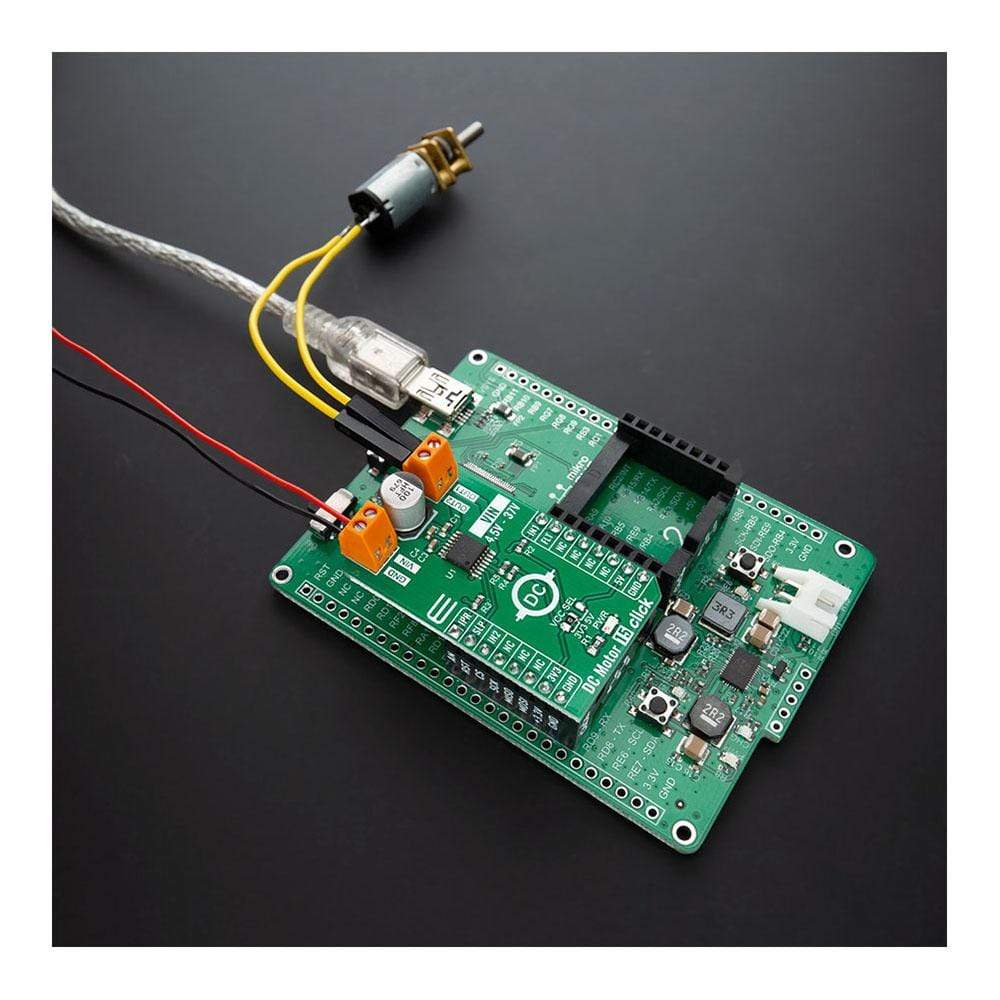
The DC Motor 15 Click Board™ is a compact add-on board that contains a motor driver with current sense and regulation. This board features the DRV8874, an integrated motor driver with N-channel H-bridge, charge pump, current sensing, and adjustment from Texas Instruments. The current sensing and regulation feature eliminates the need for a large power shunt resistor, saving board area, and reducing system cost. The current-sense output allows an MCU to detect motor stalls or changes in load conditions. The DRV8874 can also regulate the motor current during Start-Up and high-load events without interaction from MCU. This Click Board™ is suitable for a brushed DC and servo motor and actuator drive, home appliances, handheld power tools, and many more.
The DC Motor 15 Click is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das DC Motor 15 Click Board™ ist eine kompakte Zusatzplatine, die einen Motortreiber mit Strommessung und -regelung enthält. Diese Platine verfügt über den DRV8874, einen integrierten Motortreiber mit N-Kanal-H-Brücke, Ladepumpe, Strommessung und Einstellung von Texas Instruments. Die Strommessungs- und -regelungsfunktion macht einen großen Leistungs-Shunt-Widerstand überflüssig, spart Platinenfläche und reduziert die Systemkosten. Der Strommessausgang ermöglicht es einer MCU, Motorstillstände oder Änderungen der Lastbedingungen zu erkennen. Der DRV8874 kann auch den Motorstrom während des Starts und bei Hochlastereignissen ohne Interaktion mit der MCU regeln. Dieses Click Board™ ist für einen bürstenbehafteten Gleichstrom- und Servomotor und Aktuatorantrieb, Haushaltsgeräte, tragbare Elektrowerkzeuge und vieles mehr geeignet.
Der DC Motor 15 Click wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4334
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606027380907
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.