
Mikroelektronika d.o.o.
Magneto 8 Click-Platine
Magneto 8 Click-Platine
SKU: MIKROE-4204
Verfügbarkeit für Abholungen konnte nicht geladen werden
Overview
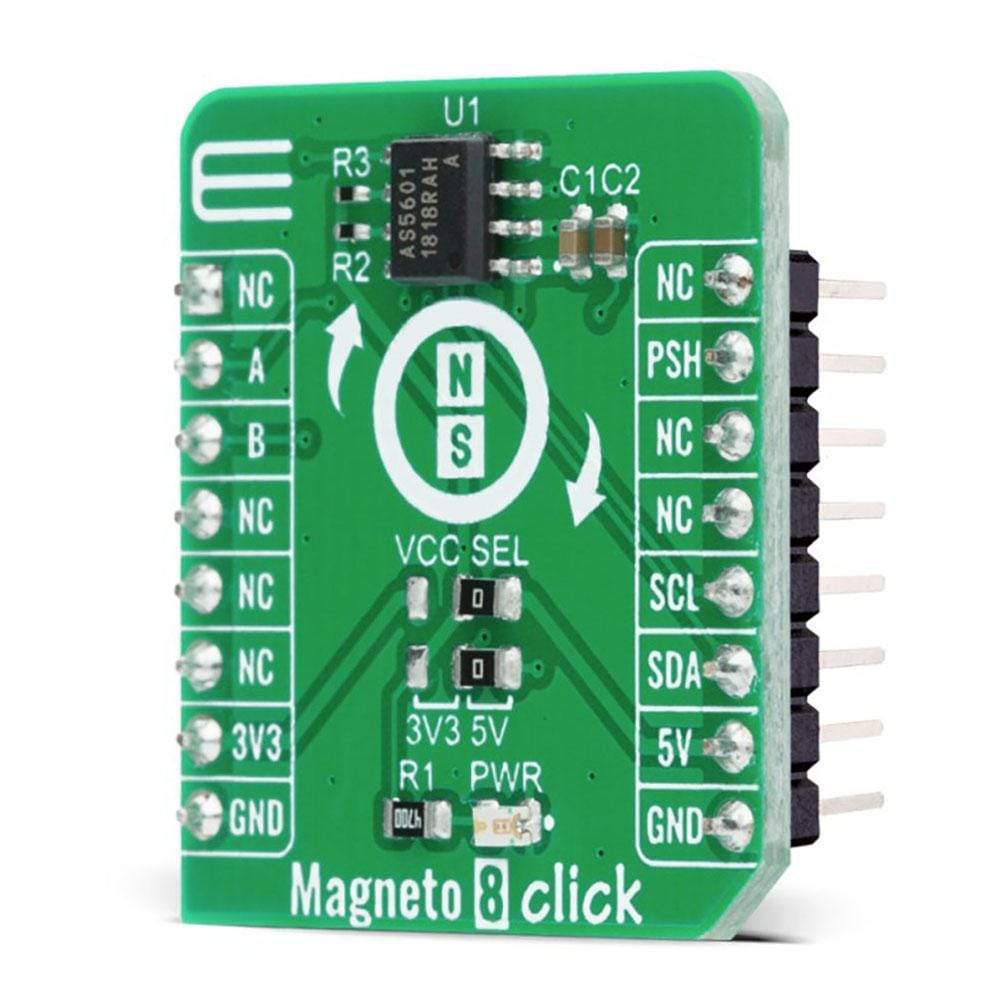
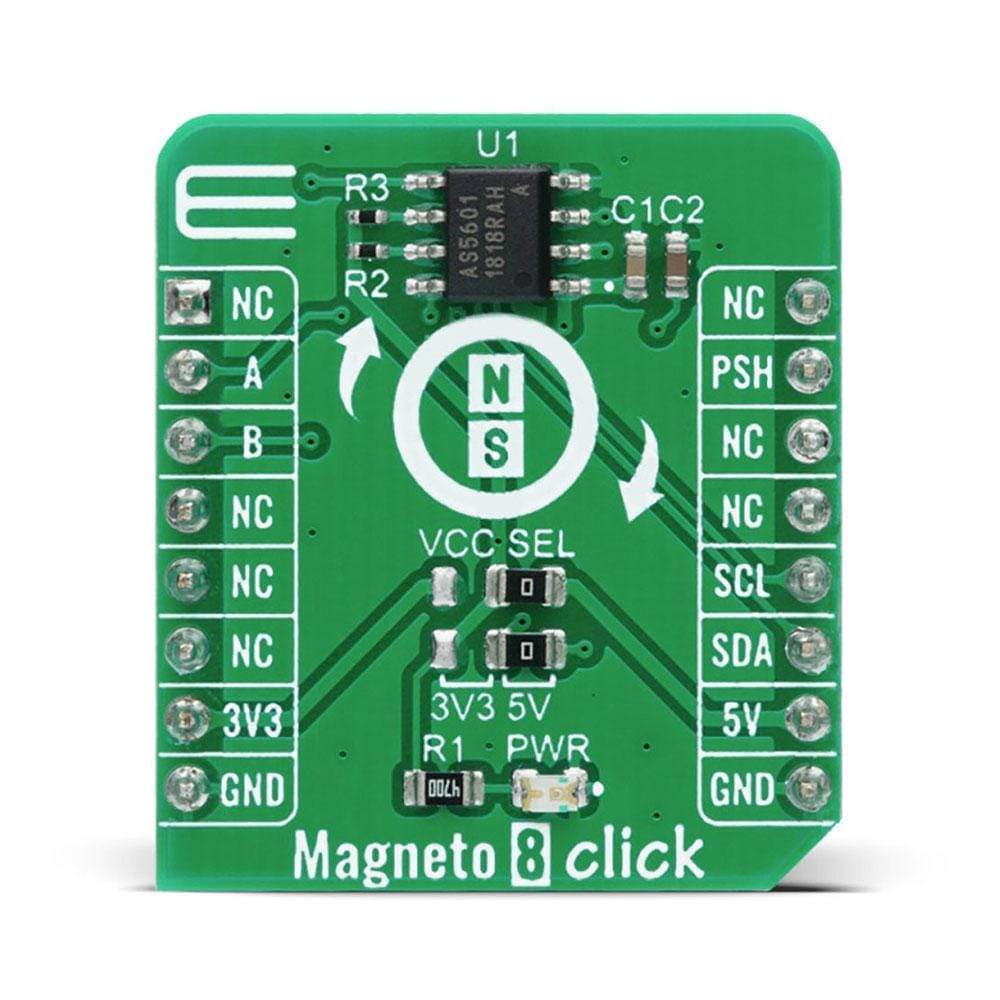
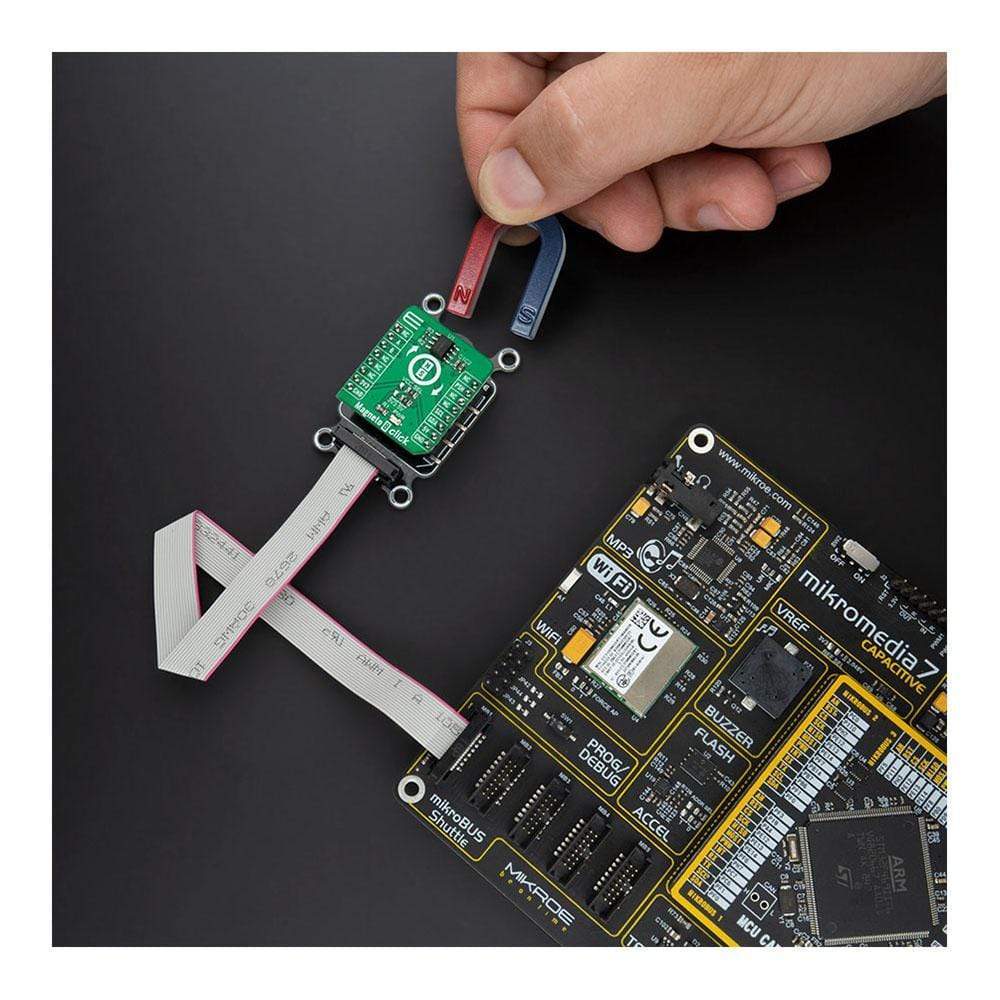
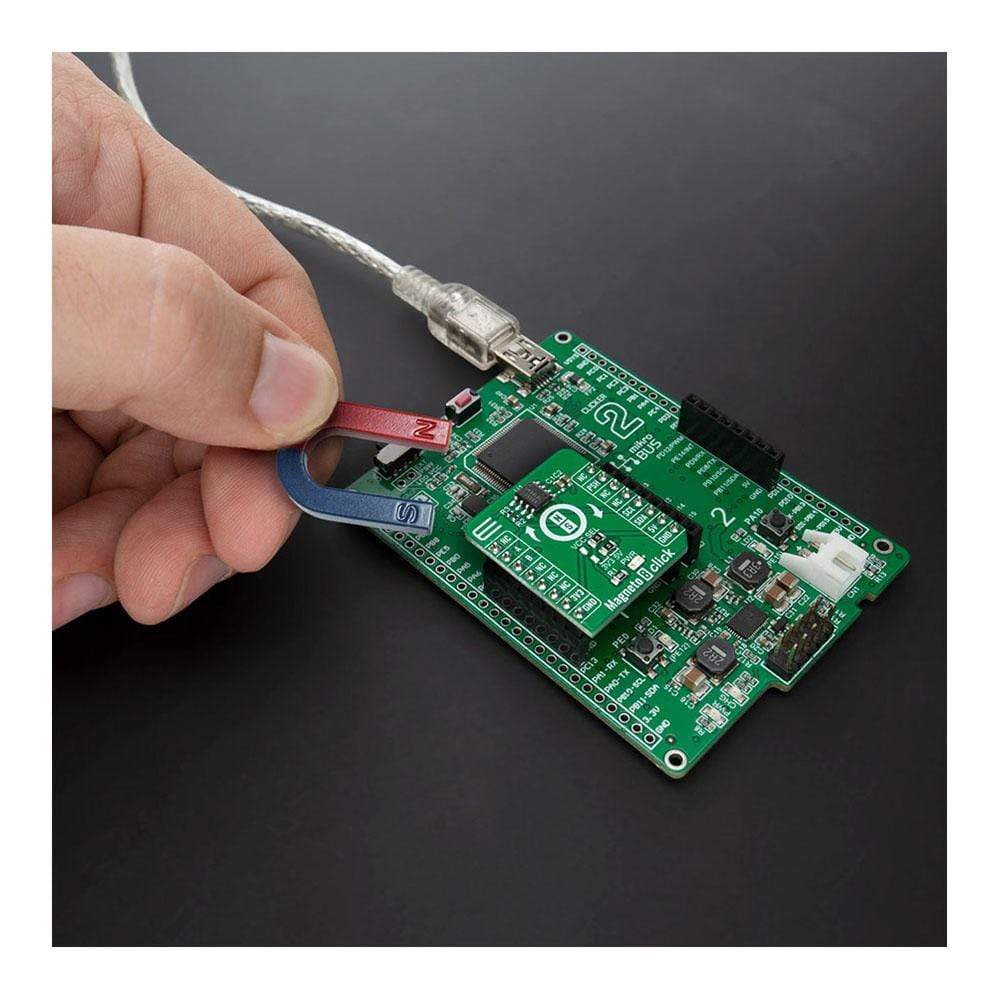
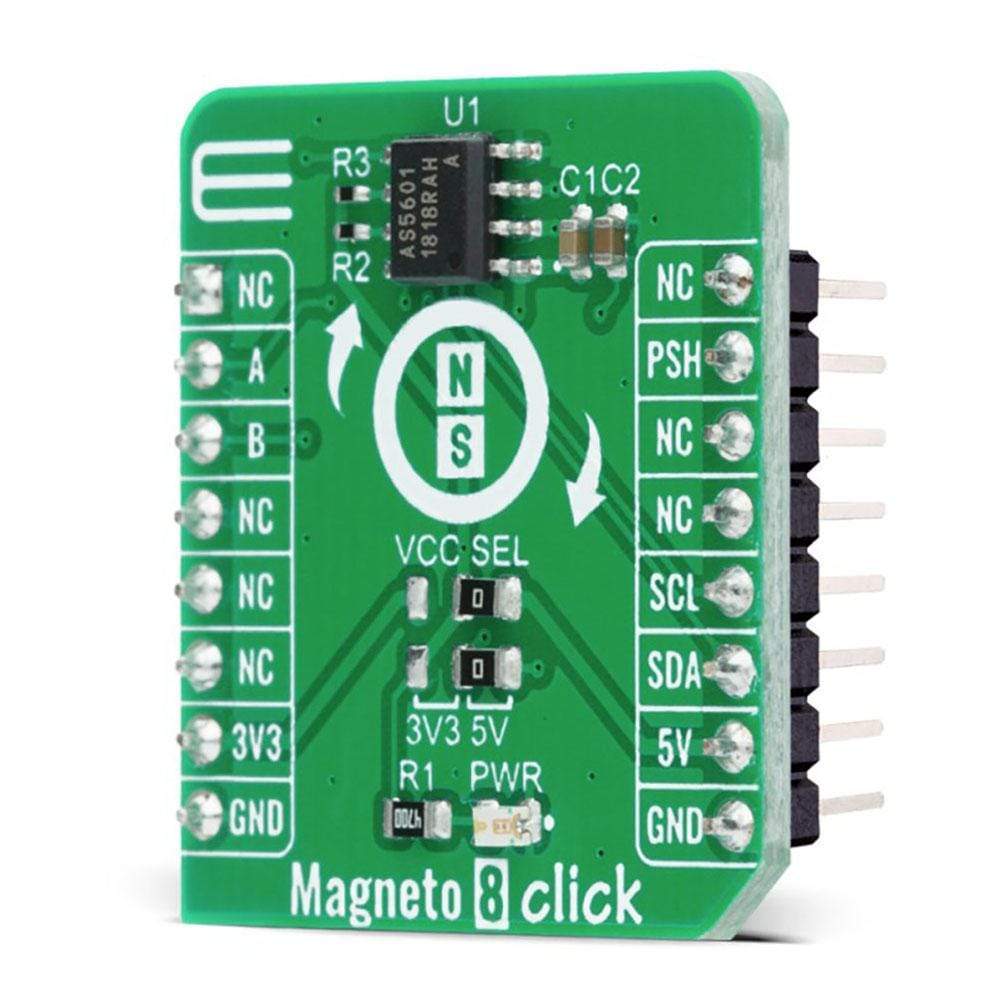
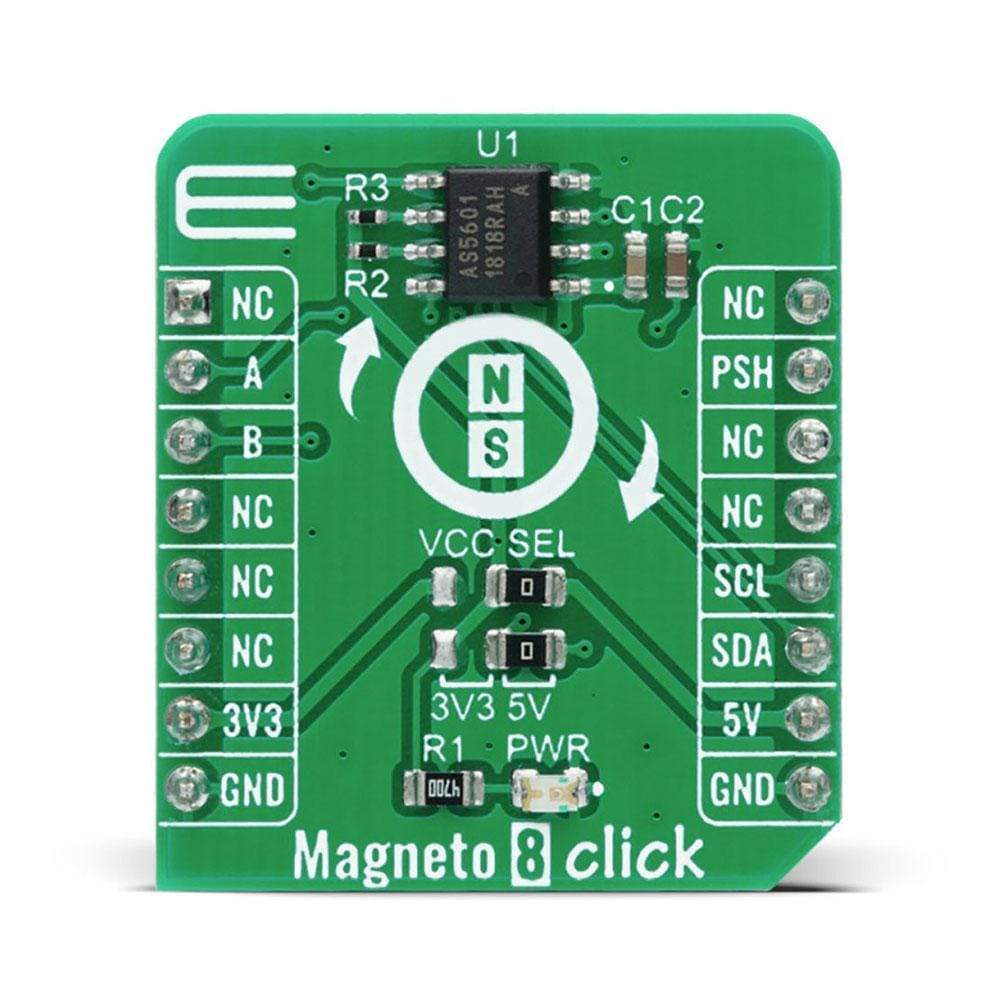
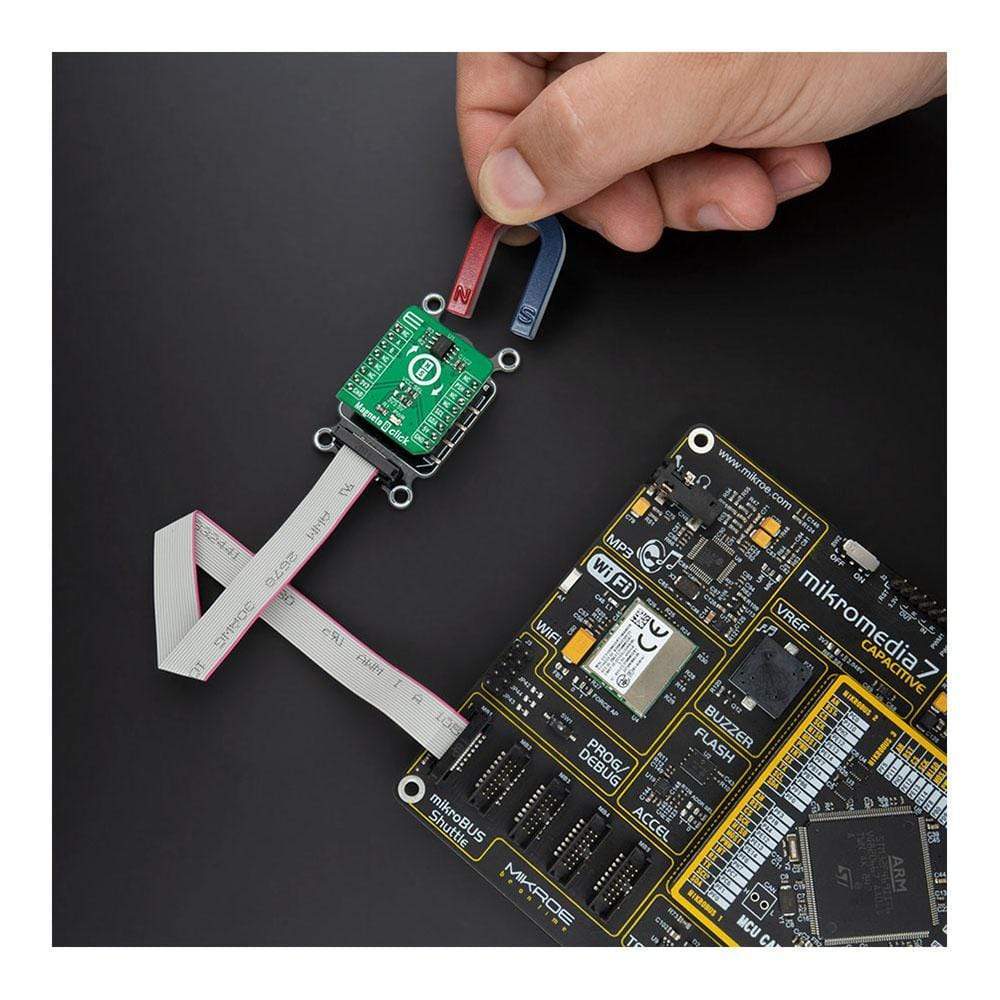
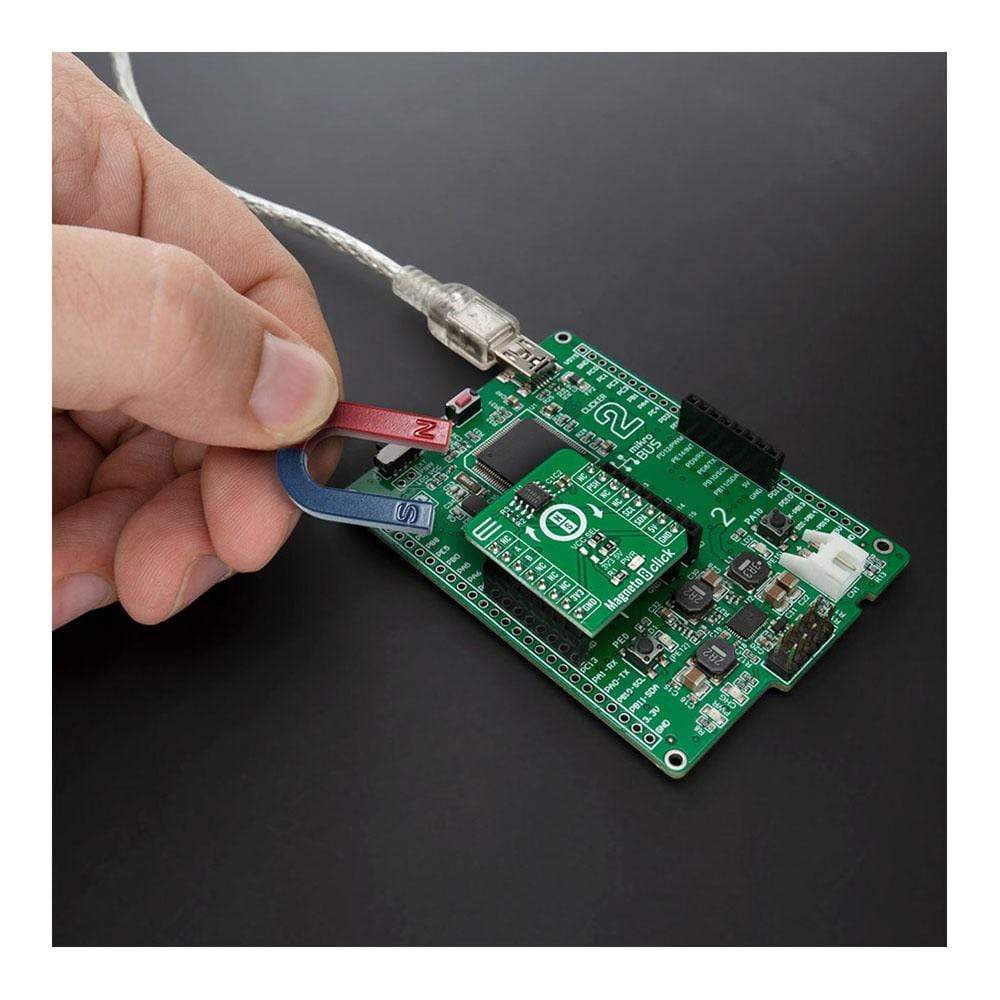
The Magneto 8 Click Board™ is a compact add-on board that contains an easy-to-program magnetic rotary position sensor with incremental quadrature (A/B) and 12-bit digital outputs. This board features the AS5601, 12-bit programmable contactless encoder IC from AMS-AG. This Click Board™ is based on a planar Hall sensor technology, supports an industry-standard I2C interface, and it measures the orthogonal component of the flux density (Bz) from an external magnet. It also provides a smart low-power mode that automatically reduces power consumption. Magneto 8 Click has many features that make it attractive for various applications such as angular position measurement solutions, encoder replacement, contactless magnetic position sensors, and more.
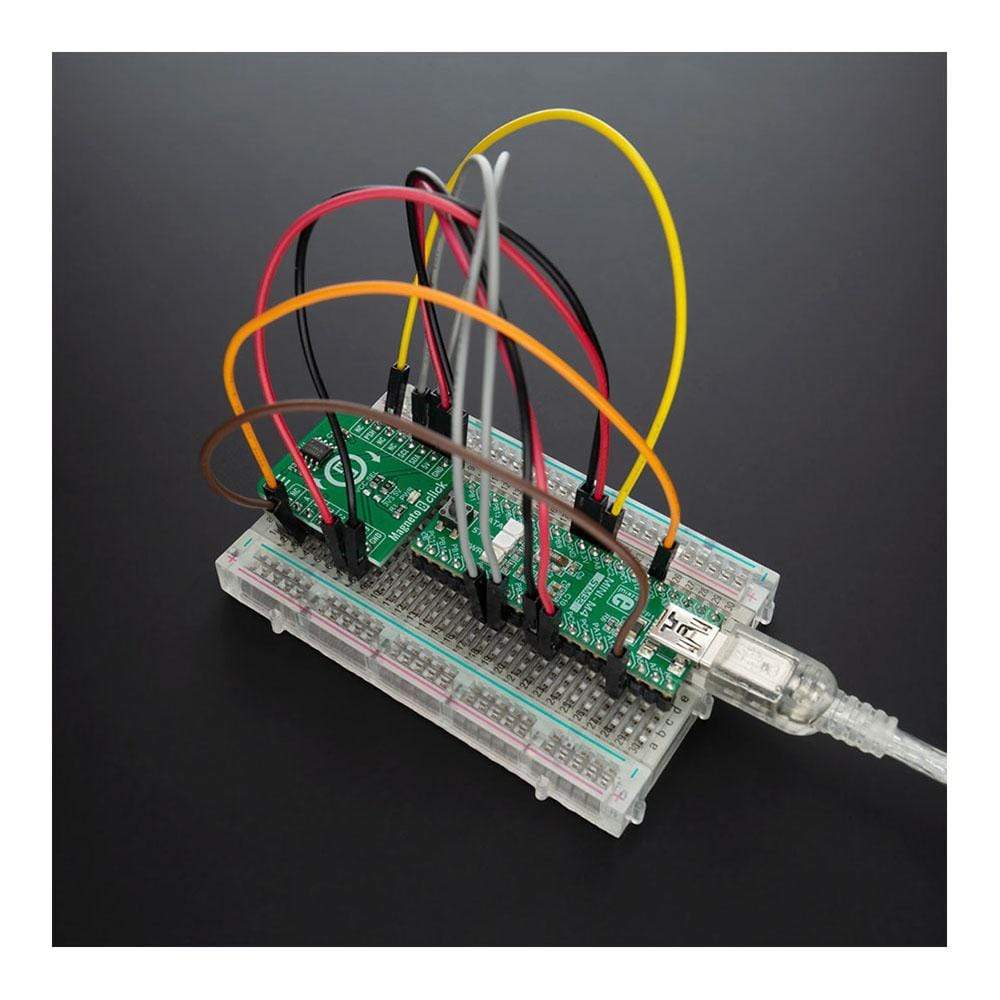
The Magneto 8 Click Board™ is supported by a mikroSDK compliant library, which includes functions that simplify software development. This Click Board™ comes as a fully tested product, ready to be used on a system equipped with the mikroBUS™ socket.
Downloads
Das Magneto 8 Click Board™ ist eine kompakte Zusatzplatine, die einen einfach zu programmierenden magnetischen Drehpositionssensor mit inkrementeller Quadratur (A/B) und 12-Bit-Digitalausgängen enthält. Diese Platine verfügt über den 12-Bit programmierbaren kontaktlosen Encoder-IC AS5601 von AMS-AG. Dieses Click Board™ basiert auf einer planaren Hall-Sensor-Technologie, unterstützt eine I2C-Schnittstelle nach Industriestandard und misst die orthogonale Komponente der Flussdichte (Bz) von einem externen Magneten. Es bietet außerdem einen intelligenten Energiesparmodus, der den Stromverbrauch automatisch reduziert. Magneto 8 Click verfügt über viele Funktionen, die es für verschiedene Anwendungen attraktiv machen, wie z. B. Lösungen zur Winkelpositionsmessung, Encoder-Ersatz, kontaktlose magnetische Positionssensoren und mehr.
Das Magneto 8 Click Board™ wird von einer mikroSDK-kompatiblen Bibliothek unterstützt, die Funktionen enthält, die die Softwareentwicklung vereinfachen. Dieses Click Board™ wird als vollständig getestetes Produkt geliefert und ist bereit für den Einsatz auf einem System, das mit der mikroBUS™-Buchse ausgestattet ist.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4204
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.017 kg
|
| Other | |
EAN |
8606027380150
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.