

Mikroelektronika d.o.o.
9DOF 3-Click-Platine
9DOF 3-Click-Platine
SKU: MIKROE-4153
Verfügbarkeit für Abholungen konnte nicht geladen werden


Overview
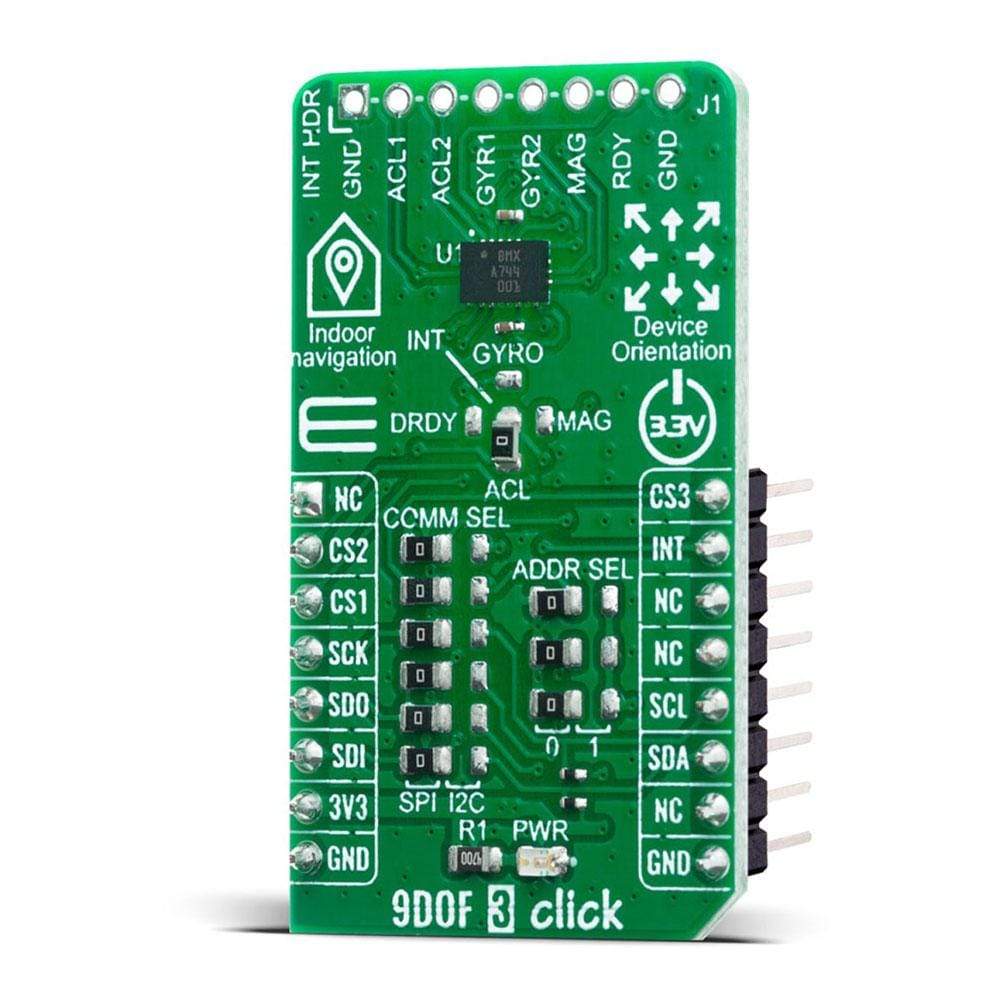
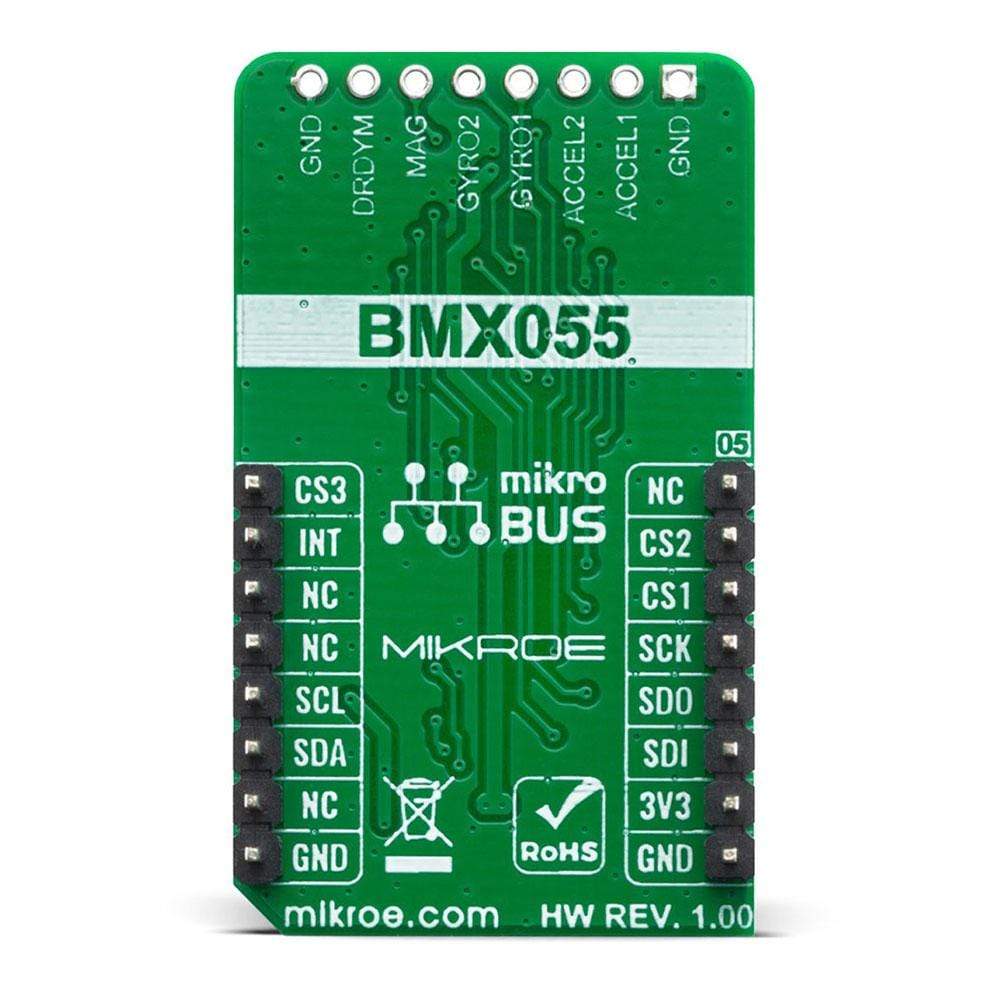
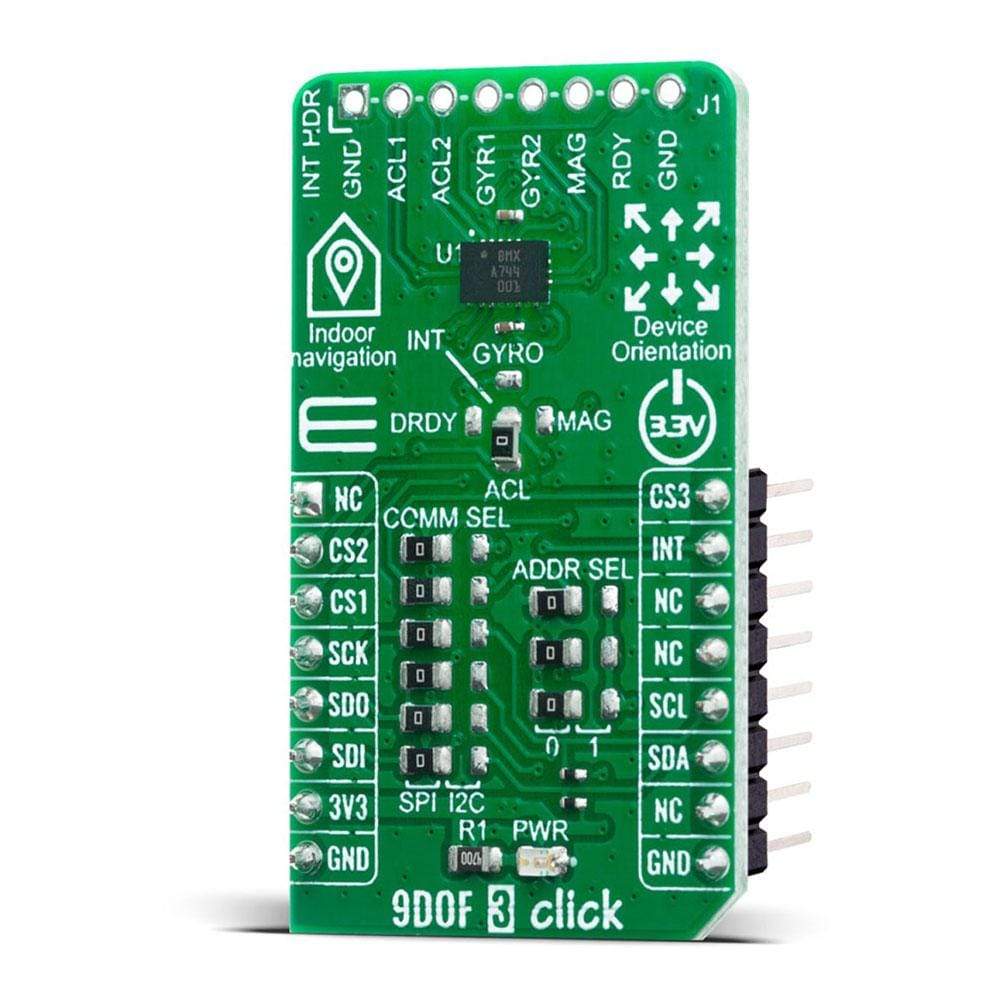
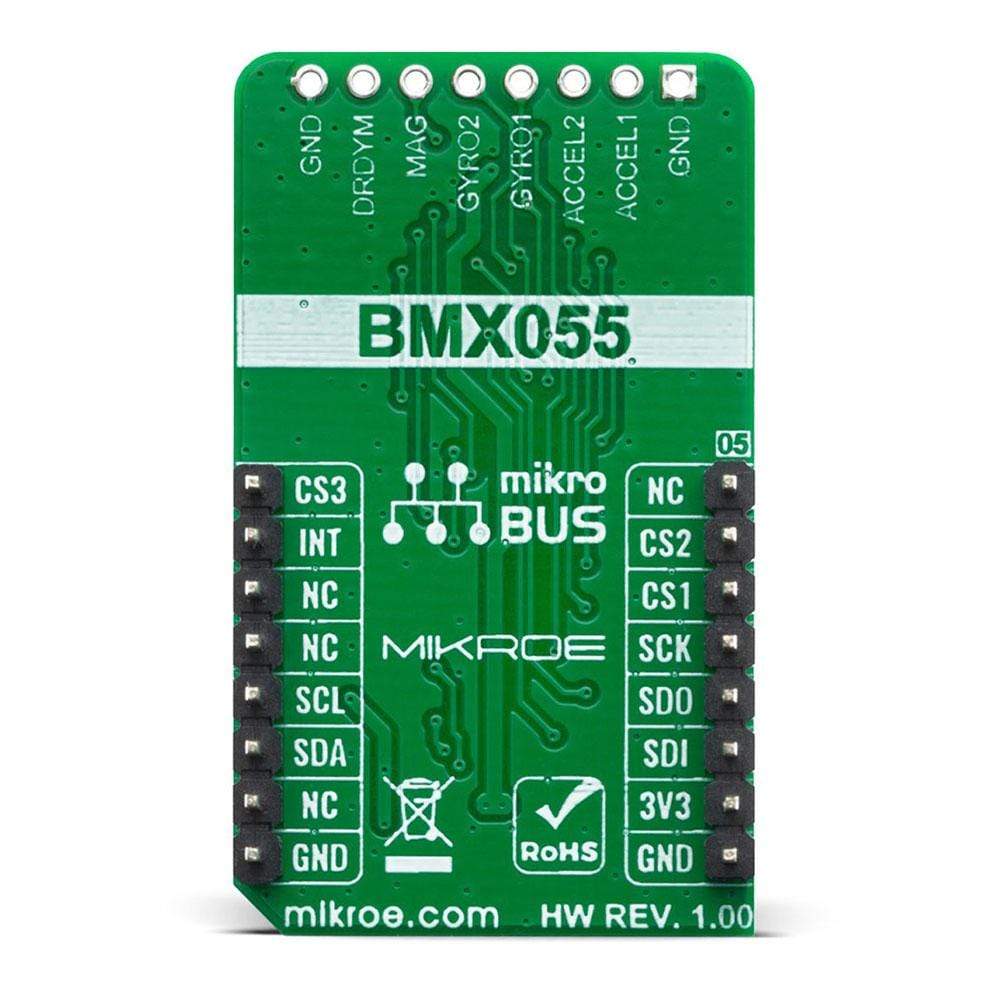
The 9DOF 3 Click Board™ introduces the BMX055, a small-scale absolute orientation sensor in the class of low-noise 9-axis measurement units, from Bosch Sensortec. It comprises the full functionality of a triaxial, low-g acceleration sensor, a triaxial angular rate sensor and a triaxial geomagnetic sensor. All three sensor components of the BMX055 can be operated and addressed independently from each other.
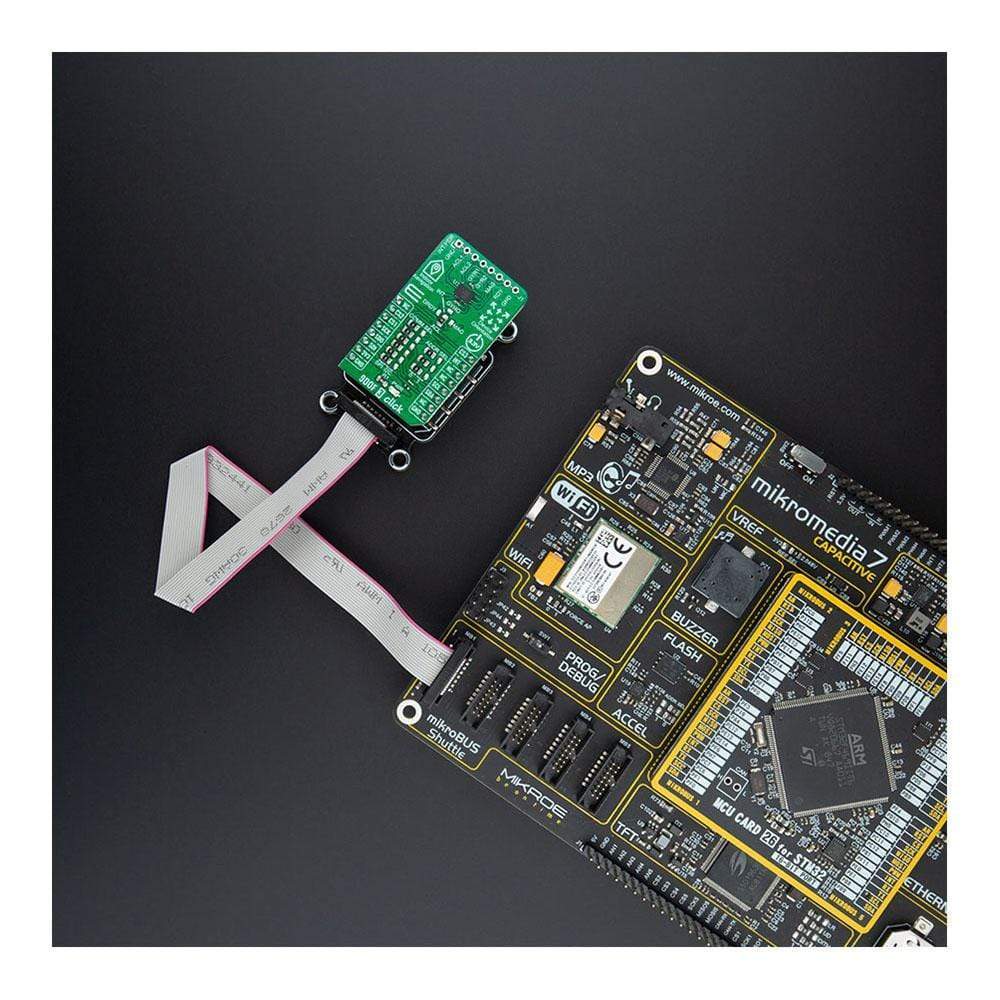
On top, the BMX055 integrates a multitude of features that facilitate its use especially in the area of motion detection applications, such as device orientation measurement, gaming, HMI or menu browser control. The 9DOF 3 Click Board™ offers both SPI and I2C digital interfaces for easy and fast system integration.
Downloads
Das 9DOF 3 Click Board™ stellt den BMX055 vor, einen kleinen absoluten Orientierungssensor in der Klasse der rauscharmen 9-Achsen-Messeinheiten von Bosch Sensortec. Er umfasst die volle Funktionalität eines dreiachsigen Low-g-Beschleunigungssensors, eines dreiachsigen Winkelgeschwindigkeitssensors und eines dreiachsigen geomagnetischen Sensors. Alle drei Sensorkomponenten des BMX055 können unabhängig voneinander betrieben und angesprochen werden.
Darüber hinaus integriert das BMX055 eine Vielzahl von Funktionen, die seinen Einsatz insbesondere im Bereich der Bewegungserkennung erleichtern, wie z. B. zur Messung der Geräteausrichtung, beim Gaming, bei HMI oder zur Menübrowsersteuerung. Das 9DOF 3 Click Board™ bietet sowohl digitale SPI- als auch I2C-Schnittstellen für eine einfache und schnelle Systemintegration.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4153
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018717811
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.