







Mikroelektronika d.o.o.
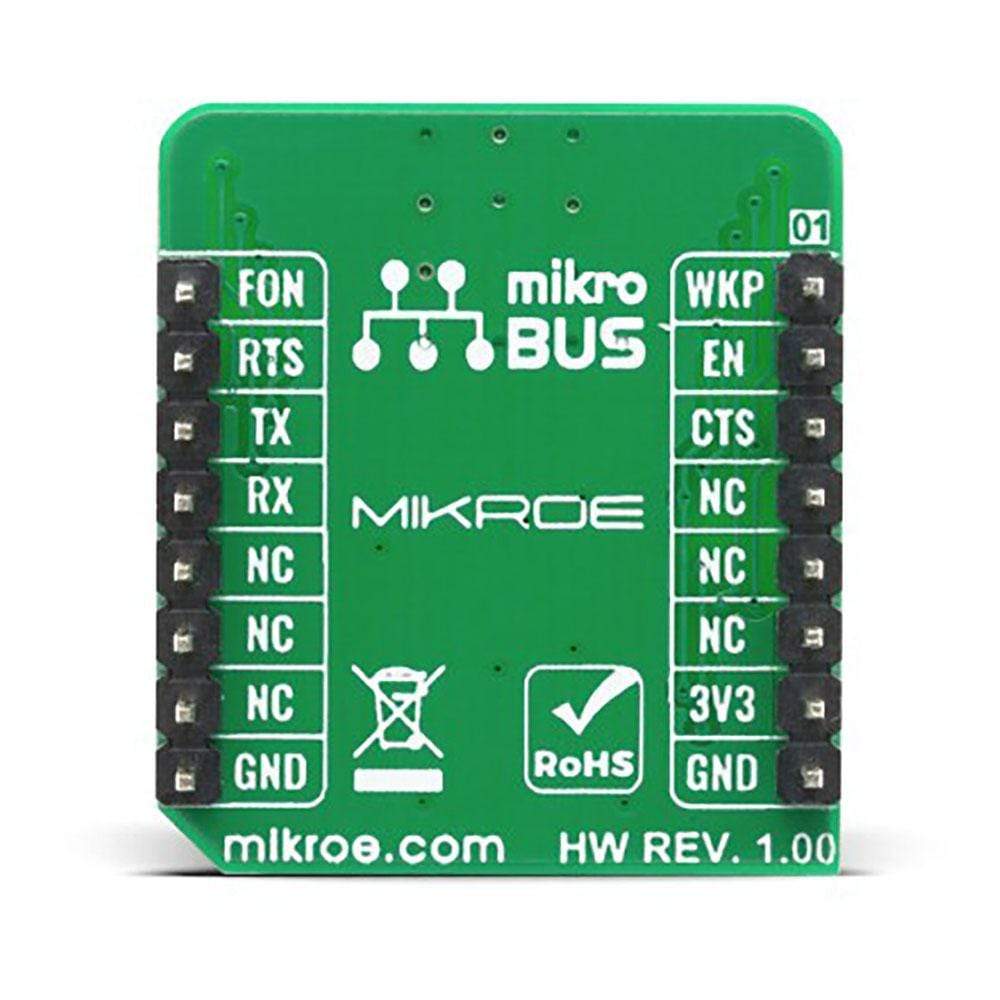
Nano GPS 2 Click-Platine
Nano GPS 2 Click-Platine
SKU: MIKROE-4150
Verfügbarkeit für Abholungen konnte nicht geladen werden



Overview
The Nano GPS 2 Click Board™ features the smallest GPS module with an integrated patch antenna, the ORG1510-MK05 a module from OriginGPS. It’s the world’s smallest multi-constellation antenna module enabling high-performance in a variety of applications. Multi Micro Hornet ORG1510-MK05 module is introducing the industry’s lowest energy per fix ratio, unparalleled accuracy, and extremely fast fixes even under challenging signal conditions, such as in built-up urban areas, dense foliage or even indoor.
Despite its size, Nano GPS 2 Click Board™ offers superior sensitivity and outstanding performance, with time to first fix (TTFF) of less than 1 second, high accuracy of less than 2.5m, and tracking sensitivity down to -165dBm.
Downloads
Das Nano GPS 2 Click Board™ verfügt über das kleinste GPS-Modul mit integrierter Patchantenne, das ORG1510-MK05, ein Modul von OriginGPS. Es ist das weltweit kleinste Antennenmodul mit mehreren Konstellationen und ermöglicht hohe Leistung in einer Vielzahl von Anwendungen. Das Multi Micro Hornet ORG1510-MK05-Modul bietet das branchenweit niedrigste Energie-pro-Fix-Verhältnis, beispiellose Genauigkeit und extrem schnelle Fixes selbst unter schwierigen Signalbedingungen, wie z. B. in bebauten Stadtgebieten, dichtem Laub oder sogar in Innenräumen.
Trotz seiner Größe bietet das Nano GPS 2 Click Board™ überragende Empfindlichkeit und herausragende Leistung mit einer Zeit bis zur ersten Ortung (TTFF) von weniger als 1 Sekunde, einer hohen Genauigkeit von weniger als 2,5 m und einer Tracking-Empfindlichkeit von bis zu -165 dBm.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4150
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606018717866
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.