







Mikroelektronika d.o.o.
Schrittmotor 14 Click-Platine
Schrittmotor 14 Click-Platine
SKU: MIKROE-4125
Verfügbarkeit für Abholungen konnte nicht geladen werden


Overview
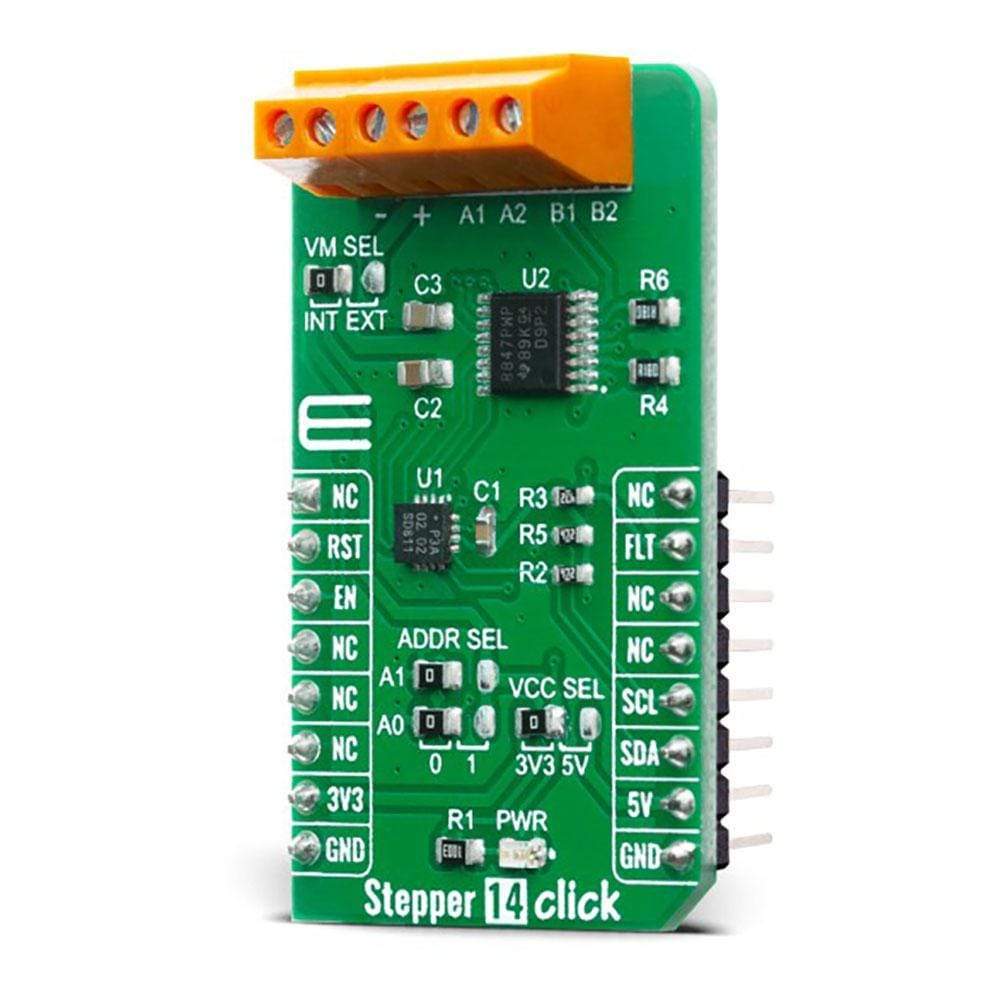
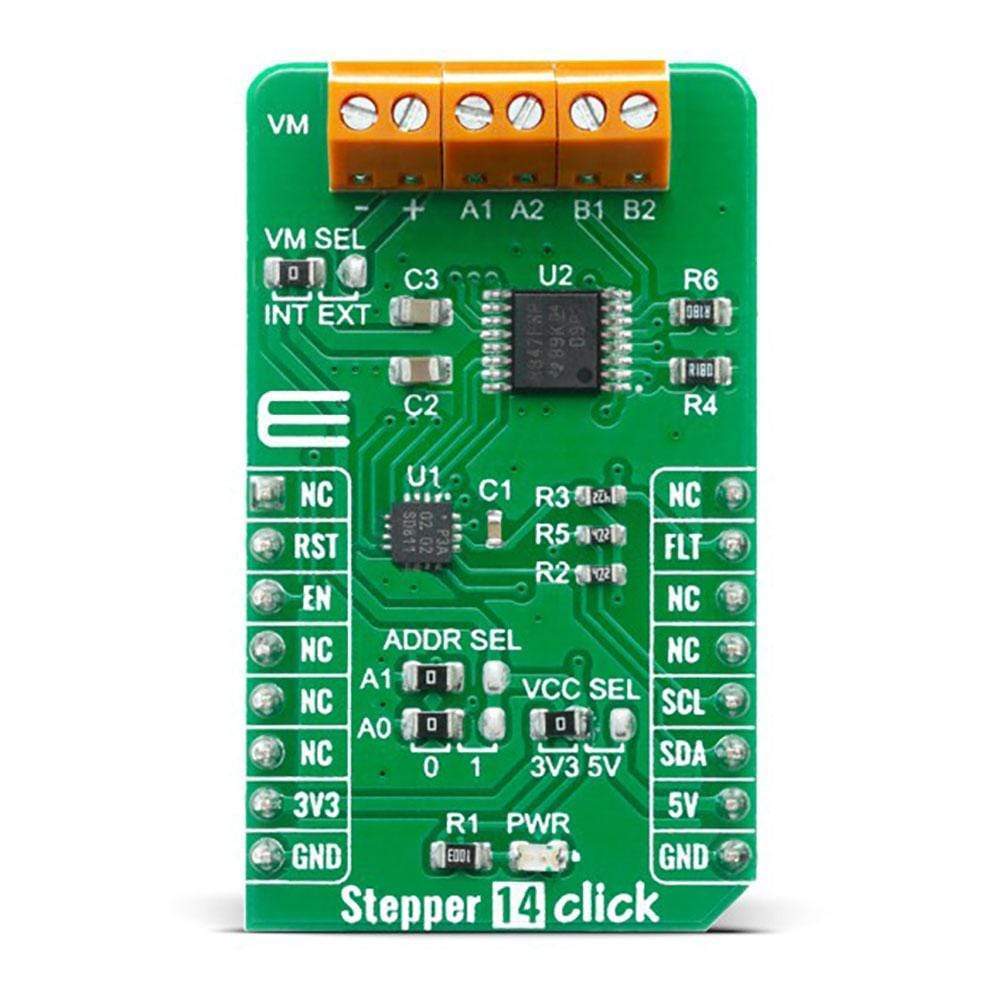
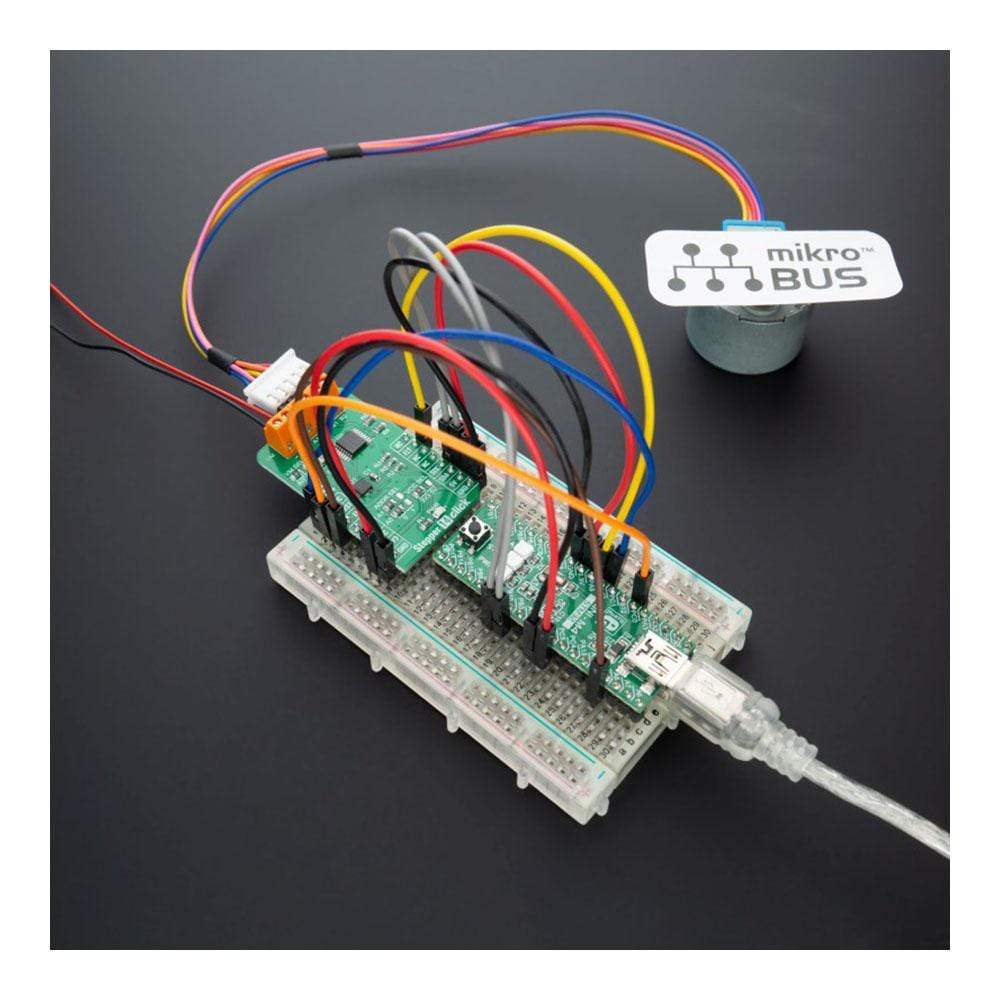
The Stepper 14 Click Board™ features the DRV8847PWPR, a step motor driver, from Texas Instruments. This Click Board™ provides a bipolar step motor controle, It features an H-bridge bipolar step motor driver, which supports full-, half-, quarter-, or eighth-step modes. This Click Board™ also carries a port expander so that the communication can be done with a minimal number of pins, through the mikroBUS™ I2C bus.
The Stepper 14 Click Board™ offers thermal protection, integrated kickback voltage protection, it has a wide range of input voltage, protection against current shoot-through the H-Bridge and high current capability. These features make Stepper 14 Click Board™ an ideal solution for driving motors in any application that demands a precise and safe step motor driver.
Downloads
Das Stepper 14 Click Board™ verfügt über den DRV8847PWPR, einen Schrittmotortreiber von Texas Instruments. Dieses Click Board™ bietet eine bipolare Schrittmotorsteuerung. Es verfügt über einen bipolaren H-Brücken-Schrittmotortreiber, der Voll-, Halb-, Viertel- oder Achtelschrittmodi unterstützt. Dieses Click Board™ verfügt außerdem über einen Port-Expander, sodass die Kommunikation mit einer minimalen Anzahl von Pins über den mikroBUS™ I2C-Bus erfolgen kann.
Das Stepper 14 Click Board™ bietet Wärmeschutz, integrierten Kickback-Spannungsschutz, einen großen Eingangsspannungsbereich, Schutz gegen Stromdurchschlag durch die H-Brücke und hohe Strombelastbarkeit. Diese Funktionen machen das Stepper 14 Click Board™ zu einer idealen Lösung für den Antrieb von Motoren in allen Anwendungen, die einen präzisen und sicheren Schrittmotortreiber erfordern.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-4125
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.019 kg
|
| Other | |
EAN |
8606018717514
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.