


Mikroelektronika d.o.o.
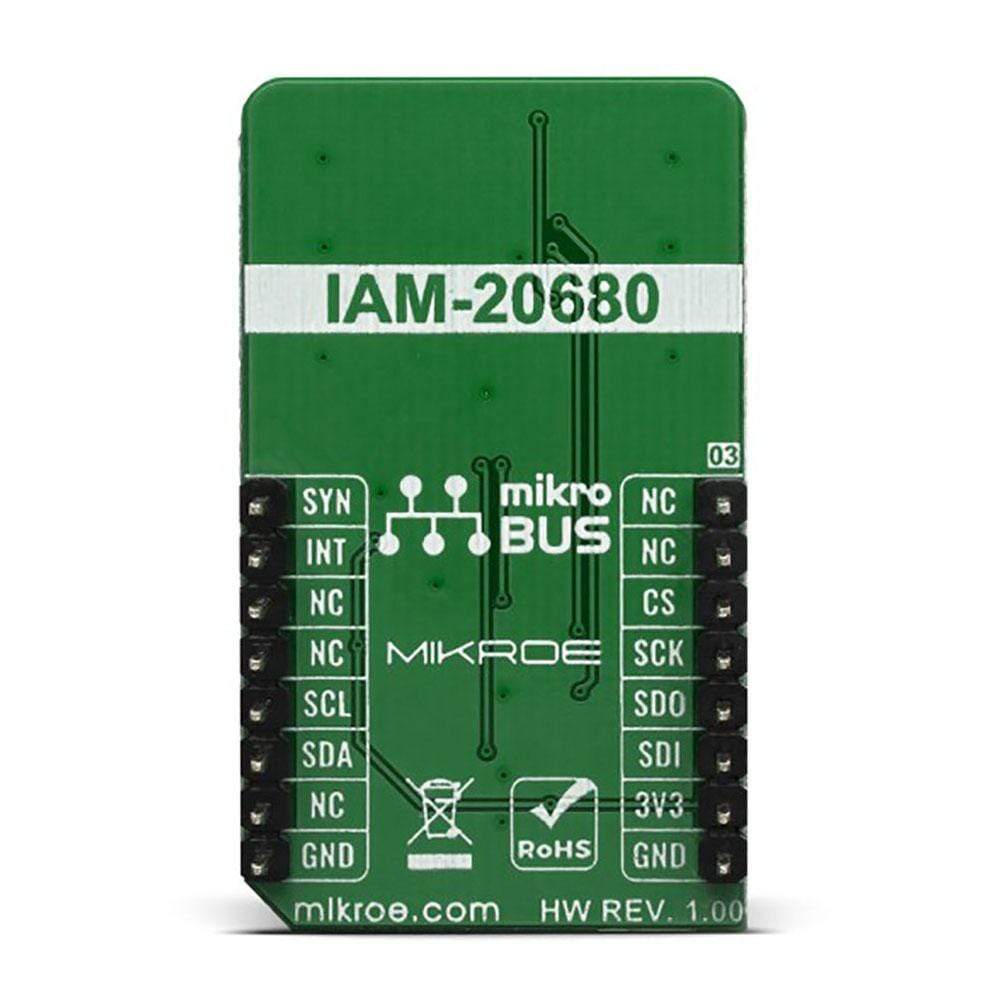
6DOF IMU 9 Click-Platine
6DOF IMU 9 Click-Platine
SKU: MIKROE-3827
Verfügbarkeit für Abholungen konnte nicht geladen werden




Overview
The 6DOF IMU 9 Click Board™ features the IAM-20680, a 6-axis motion tracking device that combines a 3-axis gyroscope and a 3-axis accelerometer, from TDK InvenSense. A combination of the two most commonly used motion sensors allows for full 6D sensing. Tailored towards the Industry 4.0.
This Click Board™ can be used for automotive applications and navigation systems aids for dead reckoning, liftgate motion detection, accurate location for vehicle to vehicle and infrastructure, 360º view camera stabilization, car alarm, telematics and insurance vehicle tracking.
Downloads
Das 6DOF IMU 9 Click Board™ verfügt über das IAM-20680, ein 6-Achsen-Bewegungsverfolgungsgerät, das ein 3-Achsen-Gyroskop und einen 3-Achsen-Beschleunigungsmesser von TDK InvenSense kombiniert. Eine Kombination der beiden am häufigsten verwendeten Bewegungssensoren ermöglicht eine vollständige 6D-Erfassung. Maßgeschneidert für Industrie 4.0.
Dieses Click Board™ kann für Automobilanwendungen und Navigationssysteme als Hilfsmittel für Koppelnavigation, Heckklappenbewegungserkennung, genaue Fahrzeug-zu-Fahrzeug- und Infrastrukturortung, 360°-Kamerastabilisierung, Autoalarmanlagen, Telematik und Versicherungsfahrzeugverfolgung verwendet werden.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3827
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018719686
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.