

Mikroelektronika d.o.o.
Accel 11 Click-Platine
Accel 11 Click-Platine
SKU: MIKROE-3440
Verfügbarkeit für Abholungen konnte nicht geladen werden
Overview
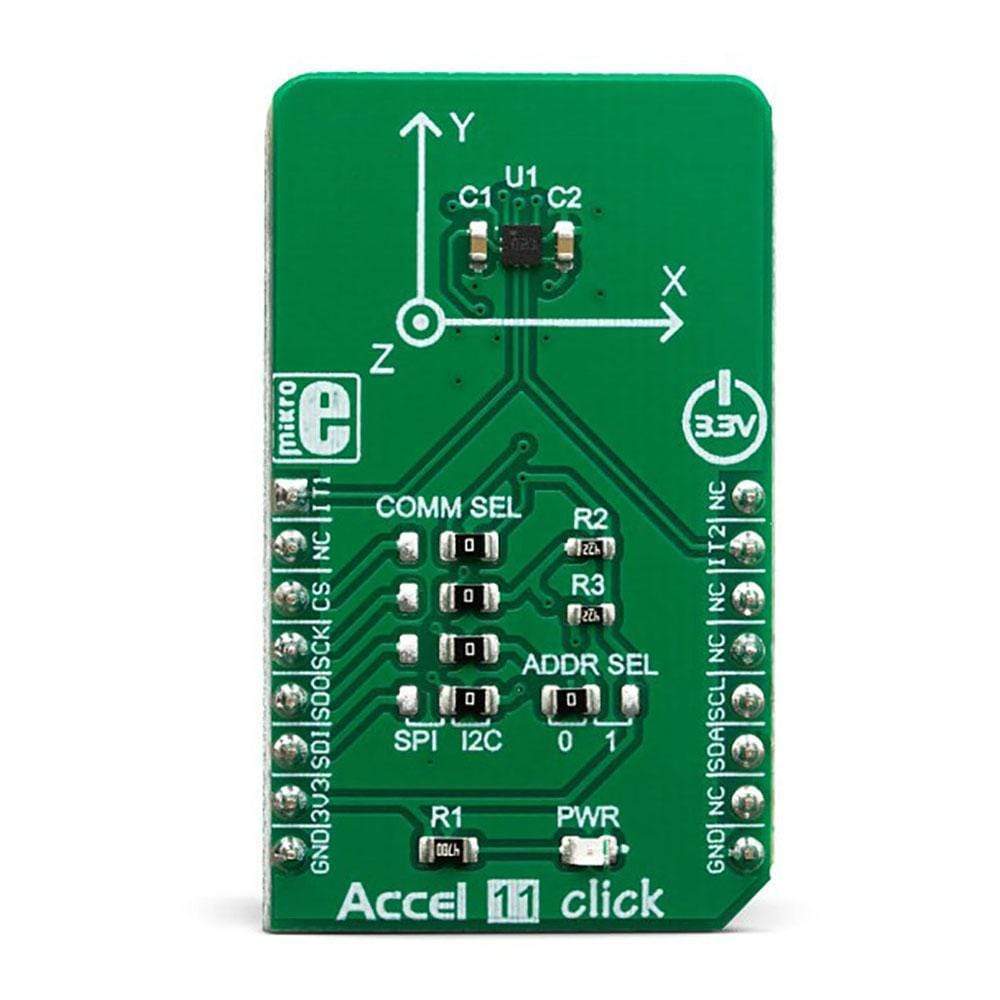
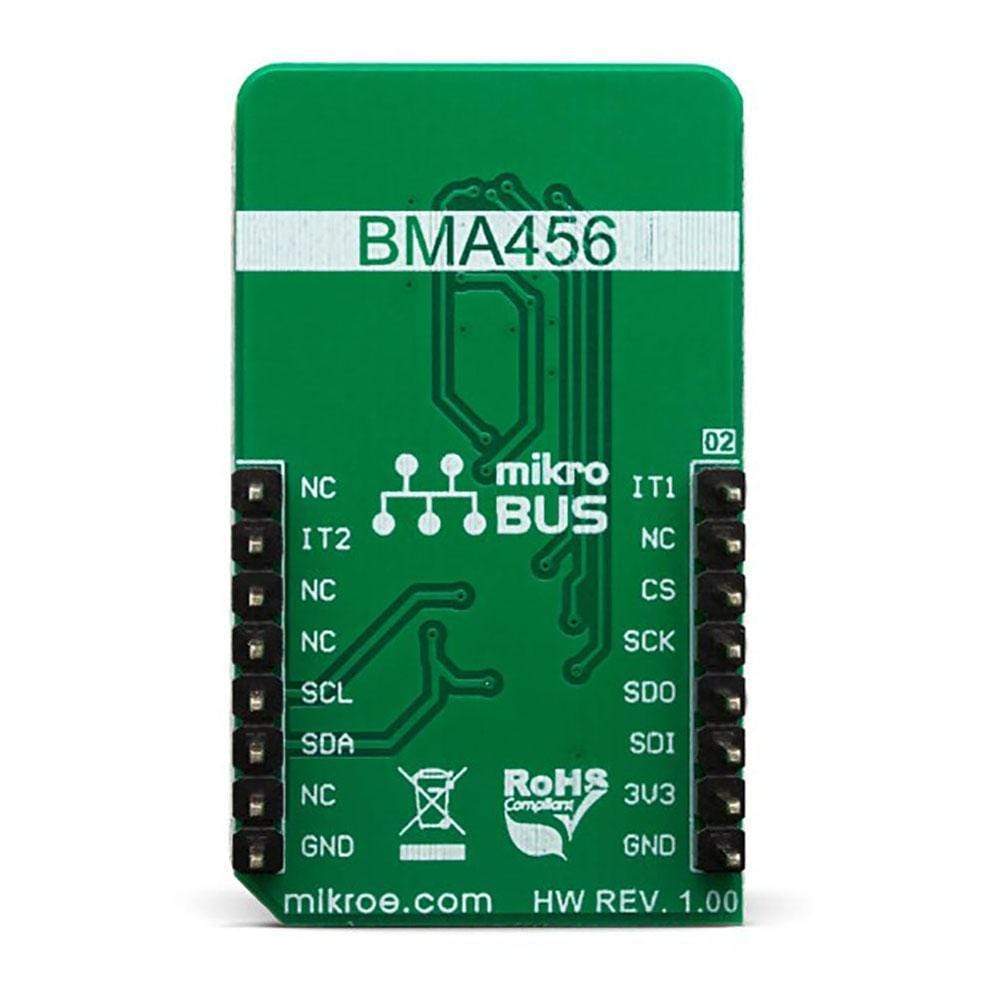
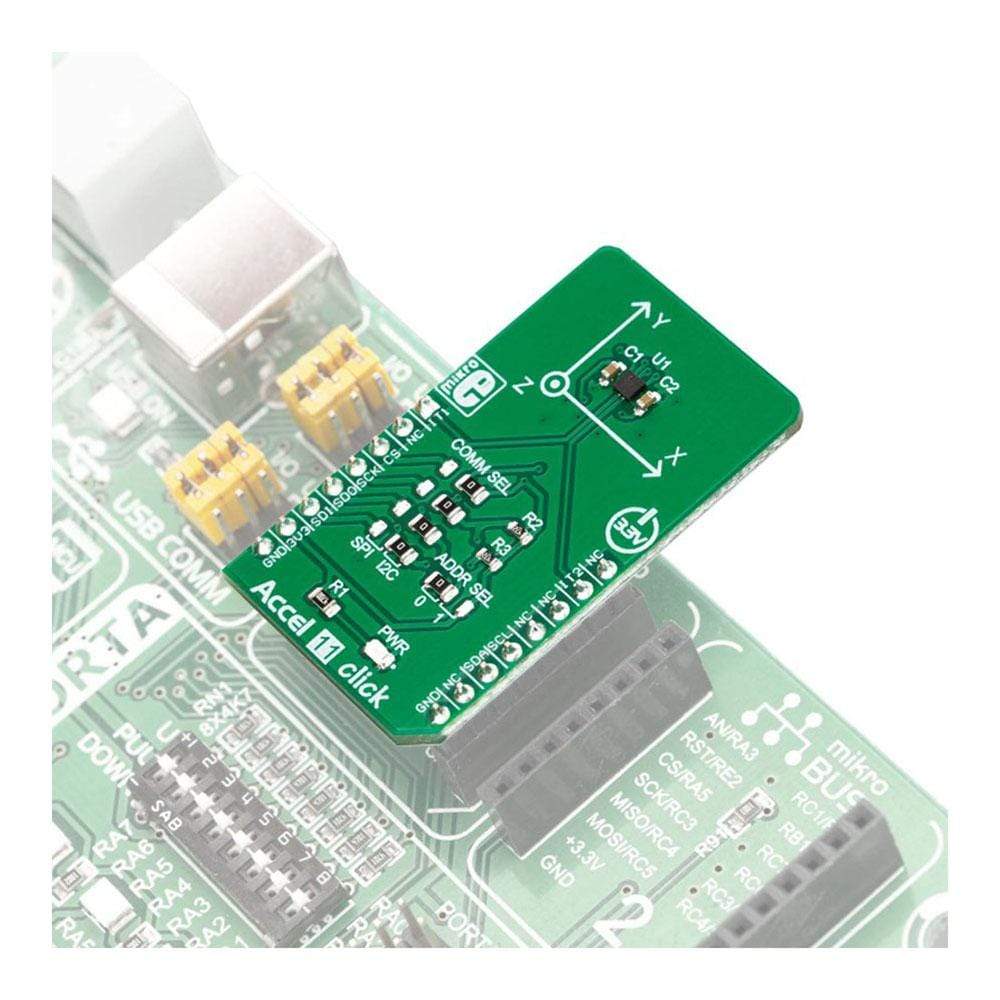
The Accel 11 Click Board™ features an ultra-low power triaxial accelerometer sensor with embedded intelligence, labelled as the BMA456. This Click Board™ allows linear motion and gravitational force measurements in ranges of ±2 g, ±4 g, ±8, and ±16 g in three perpendicular axes.
This smart sensor allows the Accel 11 Click Board™ to detect many different events, including tap, double-tap, step counting, activity recognition (walk, run, stand still), activity change (any type of acceleration pattern change), orientation, and more. It features onboard data processing, offering the acceleration data directly, over the standard I2C or SPI interface.
Downloads
Das Accel 11 Click Board™ verfügt über einen ultra-energiesparenden dreiachsigen Beschleunigungssensor mit integrierter Intelligenz, der als BMA456 bezeichnet wird. Dieses Click Board™ ermöglicht lineare Bewegungs- und Gravitationskraftmessungen in Bereichen von ±2 g, ±4 g, ±8 und ±16 g in drei senkrechten Achsen.
Mit diesem intelligenten Sensor kann das Accel 11 Click Board™ viele verschiedene Ereignisse erkennen, darunter Tippen, Doppeltippen, Schrittzählen, Aktivitätserkennung (Gehen, Laufen, Stillstehen), Aktivitätsänderung (jede Art von Änderung des Beschleunigungsmusters), Ausrichtung und mehr. Es verfügt über eine integrierte Datenverarbeitung und bietet die Beschleunigungsdaten direkt über die Standard-I2C- oder SPI-Schnittstelle.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3440
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018714872
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.