
Mikroelektronika d.o.o.
Magnetische Rotary Click-Platine
Magnetische Rotary Click-Platine
SKU: MIKROE-3275
Verfügbarkeit für Abholungen konnte nicht geladen werden
Overview
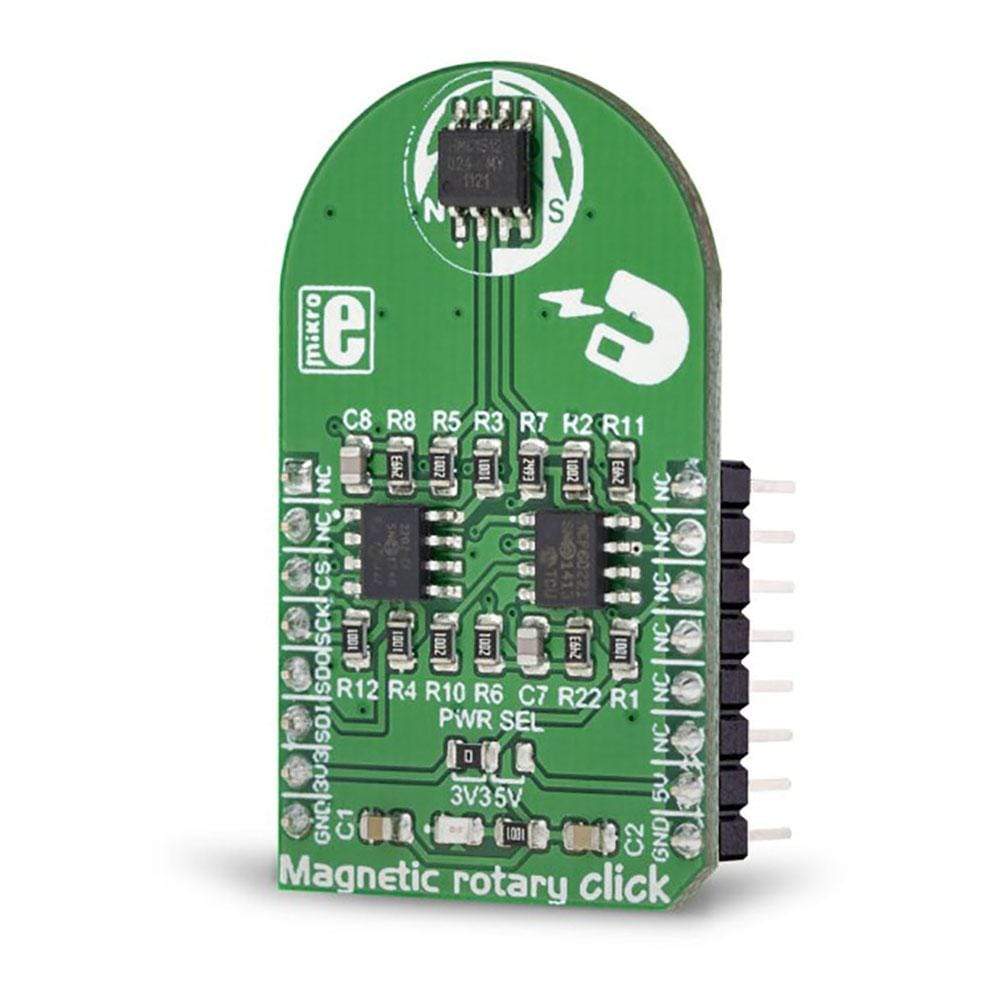
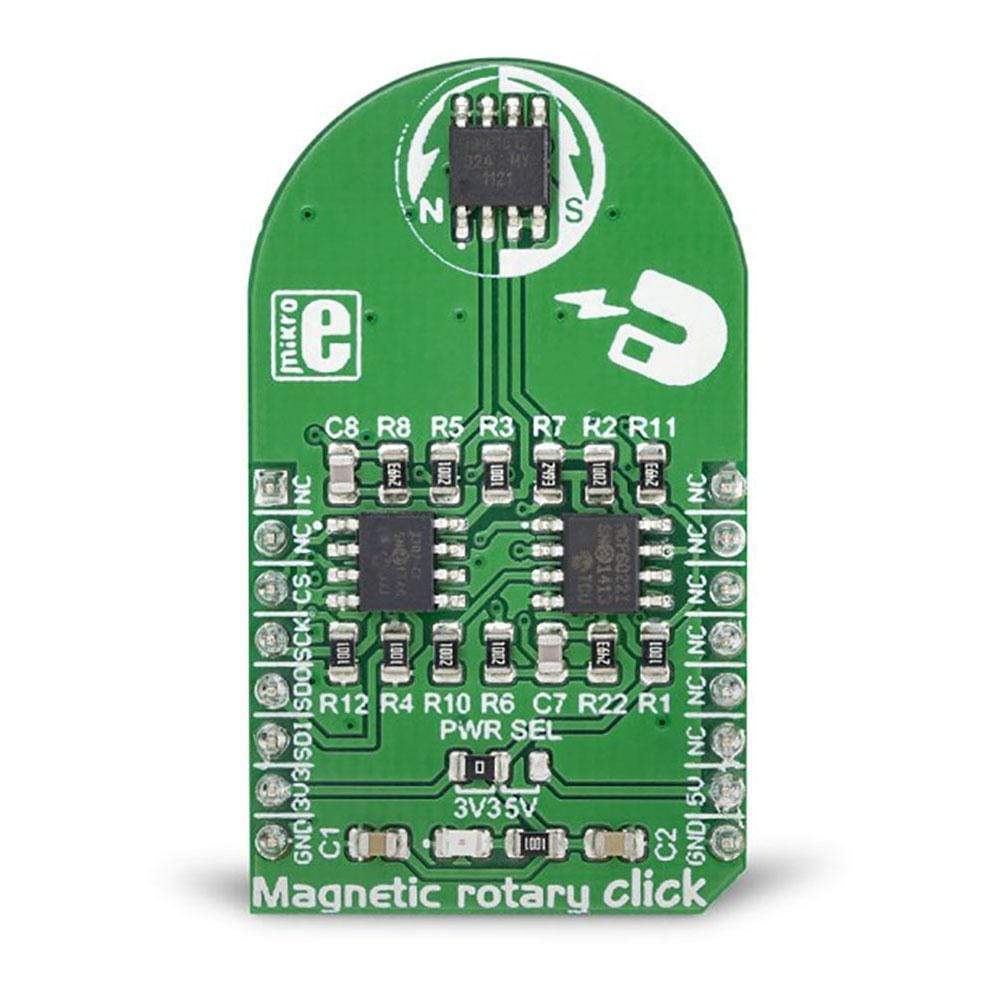
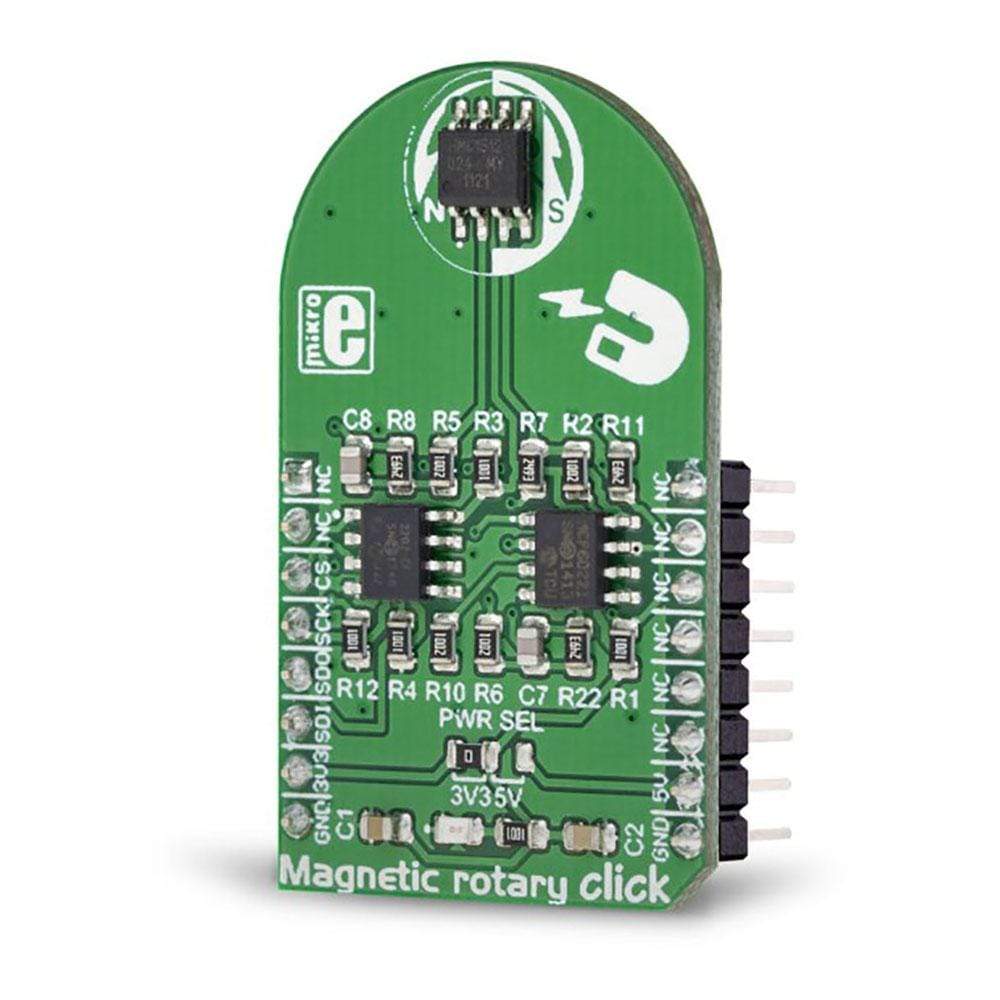
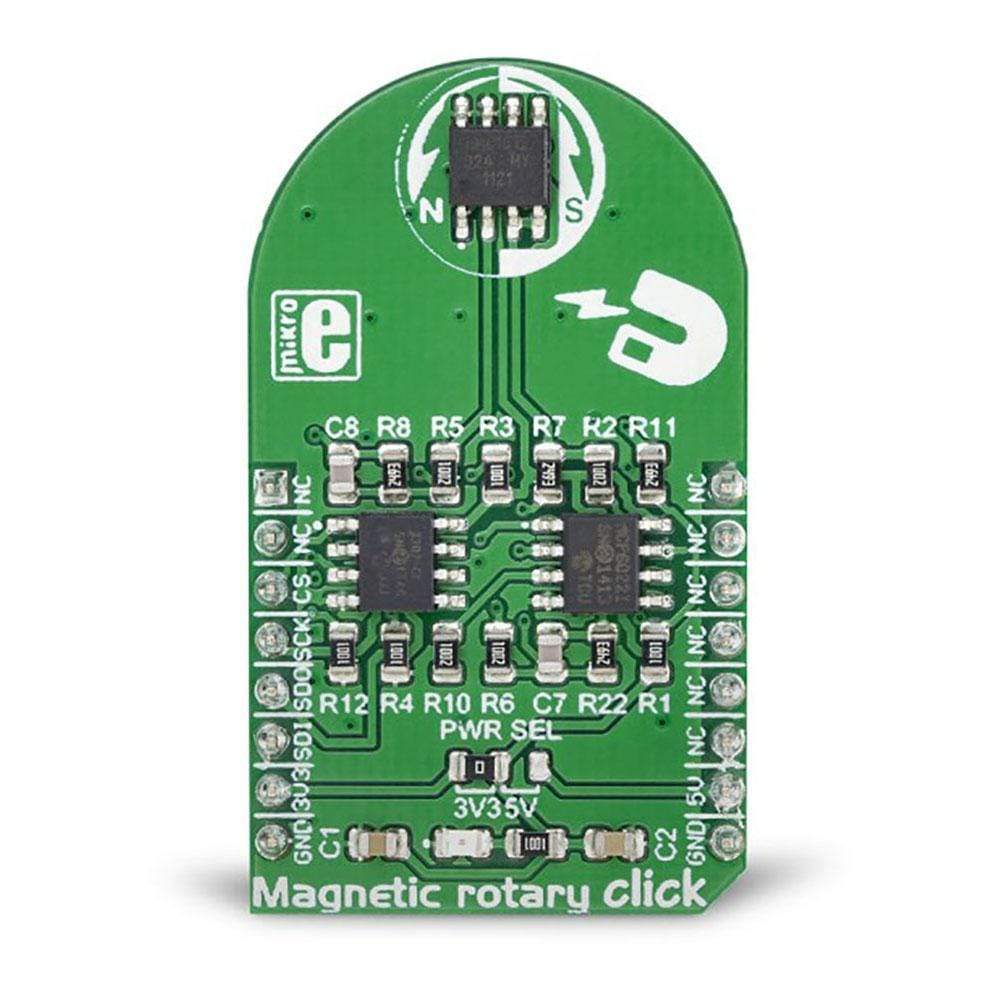
The Magnetic Rotary Click Board™ is a very accurate position sensing board that utilises the HMC1512, a magnetic field displacement sensor IC. This integrated sensor uses two co-planar saturated-mode Wheatstone bridges which consist of four magneto-resistive elements per bridge. The precision of up to 0.05° in the angular range of ±90° can be easily achieved using the Magnetic Rotary Click Board™, making it far more accurate than the commonly used Hall-effect sensors.
Downloads
Das Magnetic Rotary Click Board™ ist eine sehr genaue Positionssensorplatine, die den HMC1512 verwendet, einen Magnetfeld-Verschiebungssensor-IC. Dieser integrierte Sensor verwendet zwei koplanare Wheatstone-Brücken im gesättigten Modus, die aus vier magnetoresistiven Elementen pro Brücke bestehen. Mit dem Magnetic Rotary Click Board™ lässt sich problemlos eine Genauigkeit von bis zu 0,05° im Winkelbereich von ±90° erreichen, was es weitaus genauer macht als die üblicherweise verwendeten Hall-Effekt-Sensoren.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3275
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018714032
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.