




Mikroelektronika d.o.o.
LightRanger 4 Click-Platine
LightRanger 4 Click-Platine
SKU: MIKROE-3176
Verfügbarkeit für Abholungen konnte nicht geladen werden


Overview
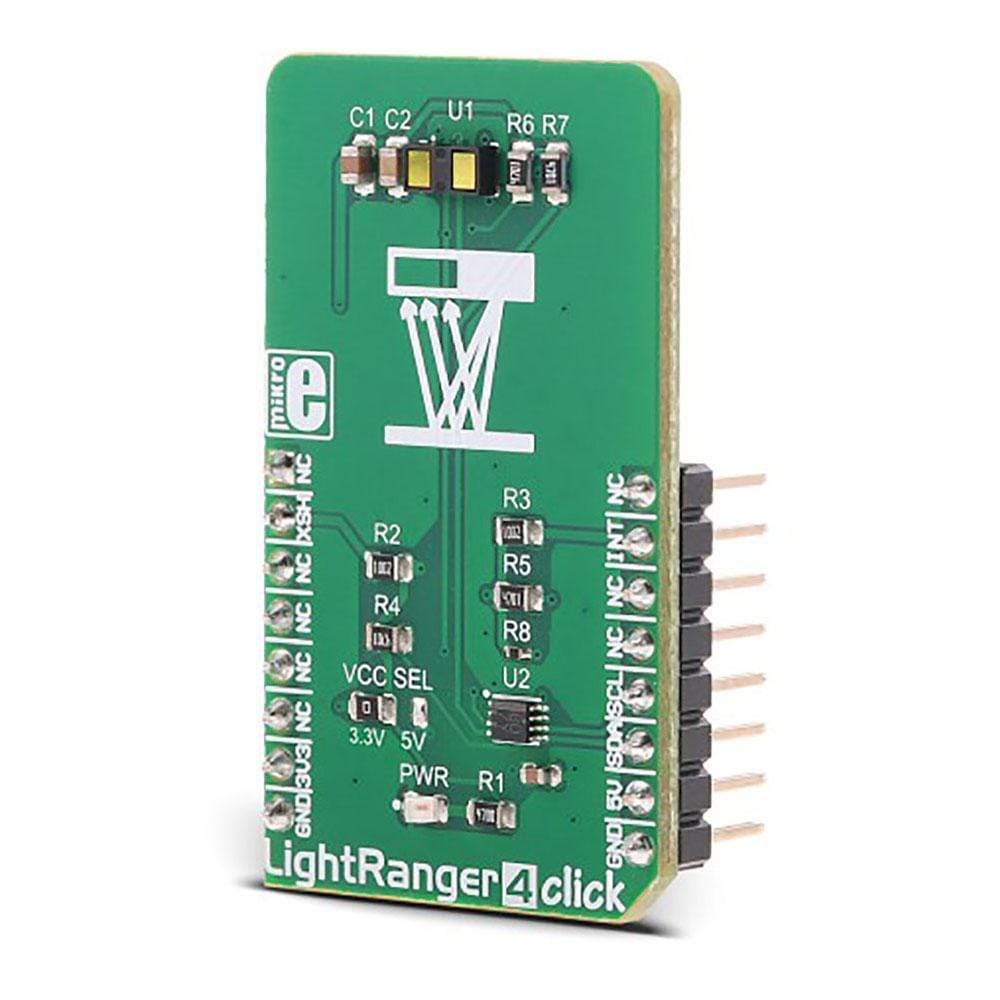
The Light Ranger 4 Click Board™ is an accurate distance measurement Click Board™ based on a ToF (Time of Flight) measurement principle. The FlightSense enabled VL53L1X rangefinder module from STMicroelectronics is a complete measurement stack on the chip. It is surprisingly easy to work with, as this highly integrated range finder module exposes only the I2C interface, XSH and INT pins to the host controller. It features the invisible Class1 laser emitter, used to emit a narrow band of a harmless modulated light beam in the IR range (940 nm), physical infrared filters and optics to achieve the best ranging performance in various ambient lighting conditions with a range of cover window options. It can measure distances up to 4000mm, with up to 50 Hz ranging frequency.
Downloads
Das Light Ranger 4 Click Board™ ist ein Click Board™ zur genauen Entfernungsmessung, das auf einem ToF-Messprinzip (Time of Flight) basiert. Das FlightSense-fähige VL53L1X-Entfernungsmessermodul von STMicroelectronics ist ein vollständiger Messstapel auf dem Chip. Es ist überraschend einfach zu handhaben, da dieses hochintegrierte Entfernungsmessermodul nur die I2C-Schnittstelle sowie die XSH- und INT-Pins zum Host-Controller freigibt. Es verfügt über den unsichtbaren Laseremitter der Klasse 1, der ein schmales Band eines harmlosen modulierten Lichtstrahls im IR-Bereich (940 nm) aussendet, sowie über physikalische Infrarotfilter und Optiken, um die beste Entfernungsmessungsleistung bei verschiedenen Umgebungslichtbedingungen mit einer Reihe von Abdeckungsfensteroptionen zu erreichen. Es kann Entfernungen bis zu 4000 mm mit einer Entfernungsmessungsfrequenz von bis zu 50 Hz messen.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3176
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018713608
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.