



Mikroelektronika d.o.o.
ATA6570 Click-Platine
ATA6570 Click-Platine
SKU: MIKROE-2900
Verfügbarkeit für Abholungen konnte nicht geladen werden



Key Features
Overview
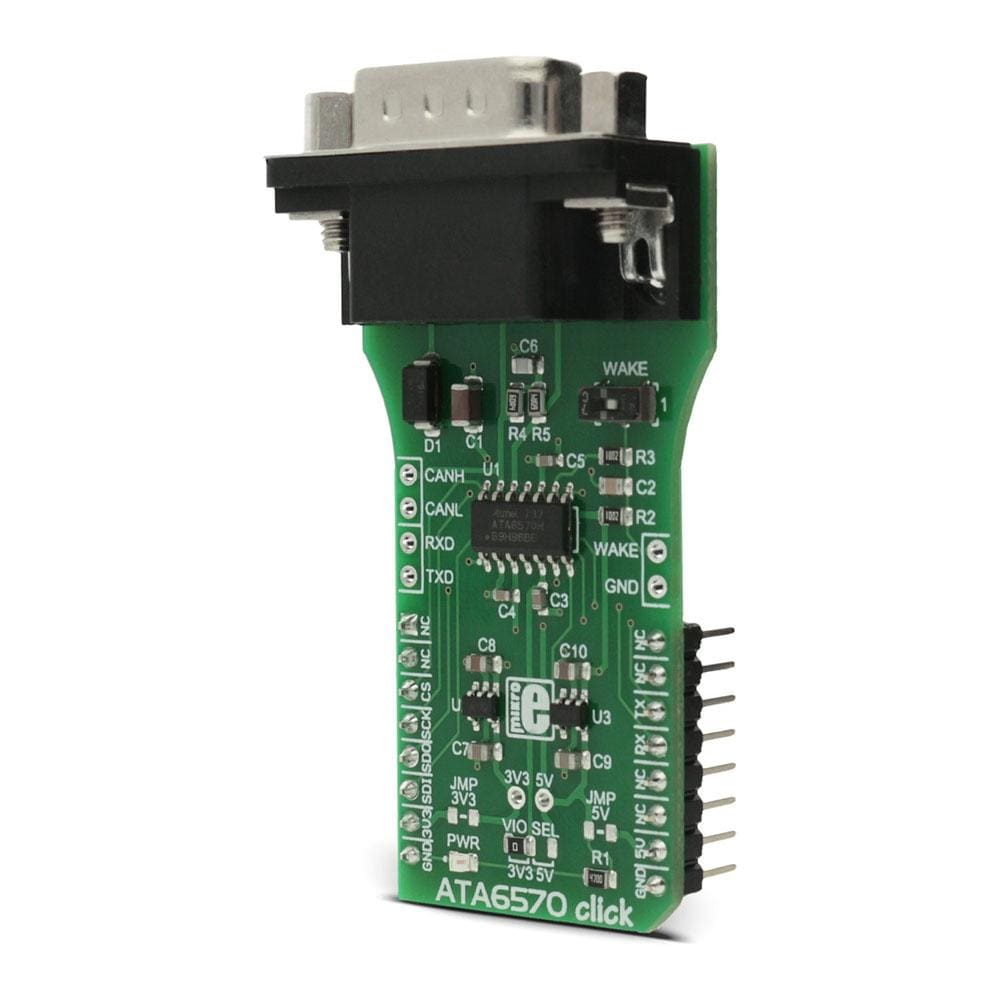
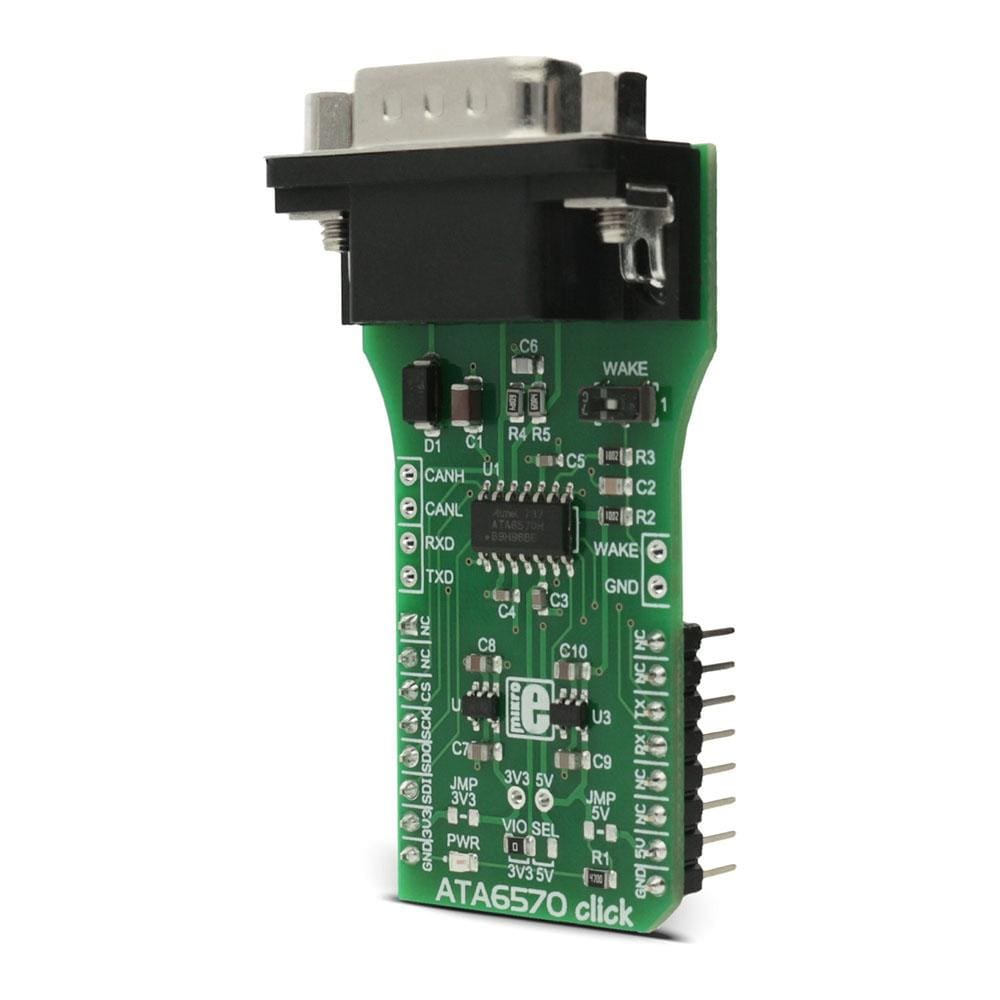
The ATA6570 Click Board™ is a CAN Partial Networking interface board. The click carries the ATA6570, a high-speed CAN transceiver that interfaces a Controller Area Network (CAN) protocol controller and the physical two-wire CAN Bus. This IC has some unique features that make it a perfect choice for any embedded CAN application.
It supports both CAN and CAN FD protocol types, partial networking, local and remote wake up, an SPI interface for internal registers configuration, and it features six operating modes as well as the under-voltage and overtemperature protection. The power consumption is taken to a minimum, as the ATA6570 can power down the entire system until a valid wake-up frame is received - even on a busy CAN bus. The car battery supply pin and the CAN bus pins are protected from various interferences and voltage instabilities, typically observed in automotive systems. The ATA6570 Click Board™ provides you with a robust and reliable CAN bus interface.
Downloads
Das ATA6570 Click Board™ ist eine CAN Partial Networking-Schnittstellenkarte. Das Click enthält den ATA6570, einen Hochgeschwindigkeits-CAN-Transceiver, der einen Controller Area Network (CAN)-Protokollcontroller und den physischen Zweidraht-CAN-Bus verbindet. Dieser IC verfügt über einige einzigartige Funktionen, die ihn zur perfekten Wahl für jede eingebettete CAN-Anwendung machen.
Es unterstützt sowohl CAN- als auch CAN-FD-Protokolltypen, teilweise Vernetzung, lokales und Remote-Aktivieren, eine SPI-Schnittstelle für die Konfiguration interner Register und verfügt über sechs Betriebsmodi sowie Unterspannungs- und Übertemperaturschutz. Der Stromverbrauch wird auf ein Minimum reduziert, da der ATA6570 das gesamte System herunterfahren kann, bis ein gültiger Aktivierungsrahmen empfangen wird – sogar bei einem ausgelasteten CAN-Bus. Der Autobatterie-Versorgungspin und die CAN-Bus-Pins sind vor verschiedenen Störungen und Spannungsinstabilitäten geschützt, die typischerweise in Automobilsystemen auftreten. Das ATA6570 Click Board™ bietet Ihnen eine robuste und zuverlässige CAN-Bus-Schnittstelle.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-2900
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.028 kg
|
| Other | |
EAN |
8606018712373
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.