


Mikroelektronika d.o.o.
ATA6563 Click-Platine
ATA6563 Click-Platine
SKU: MIKROE-2334
Verfügbarkeit für Abholungen konnte nicht geladen werden


Key Features
Overview
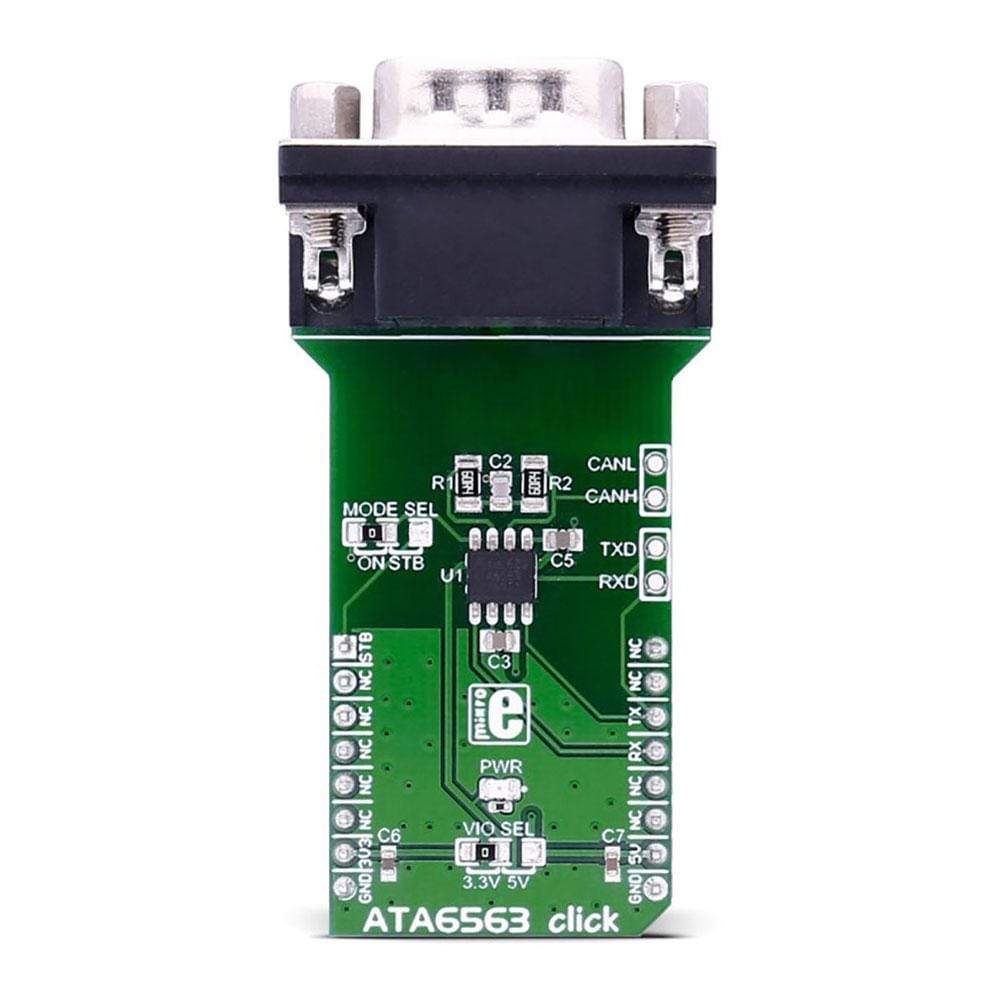
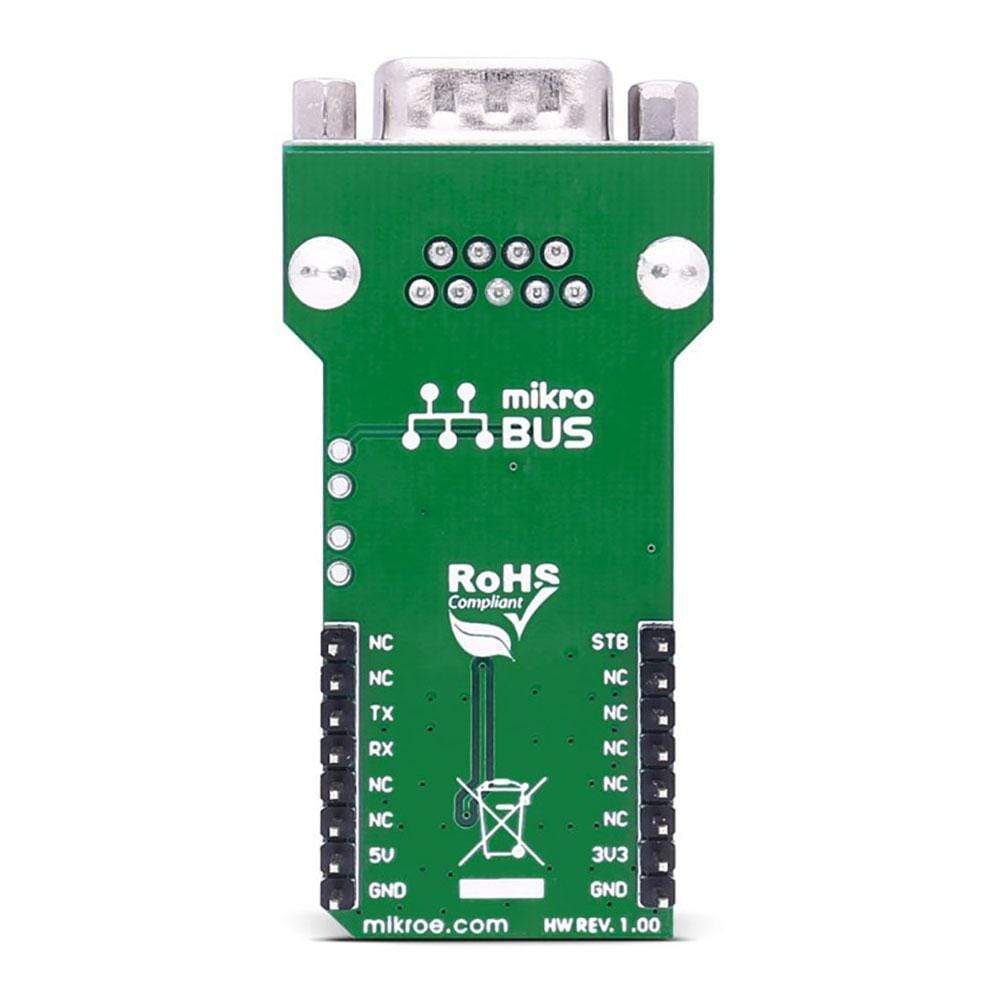
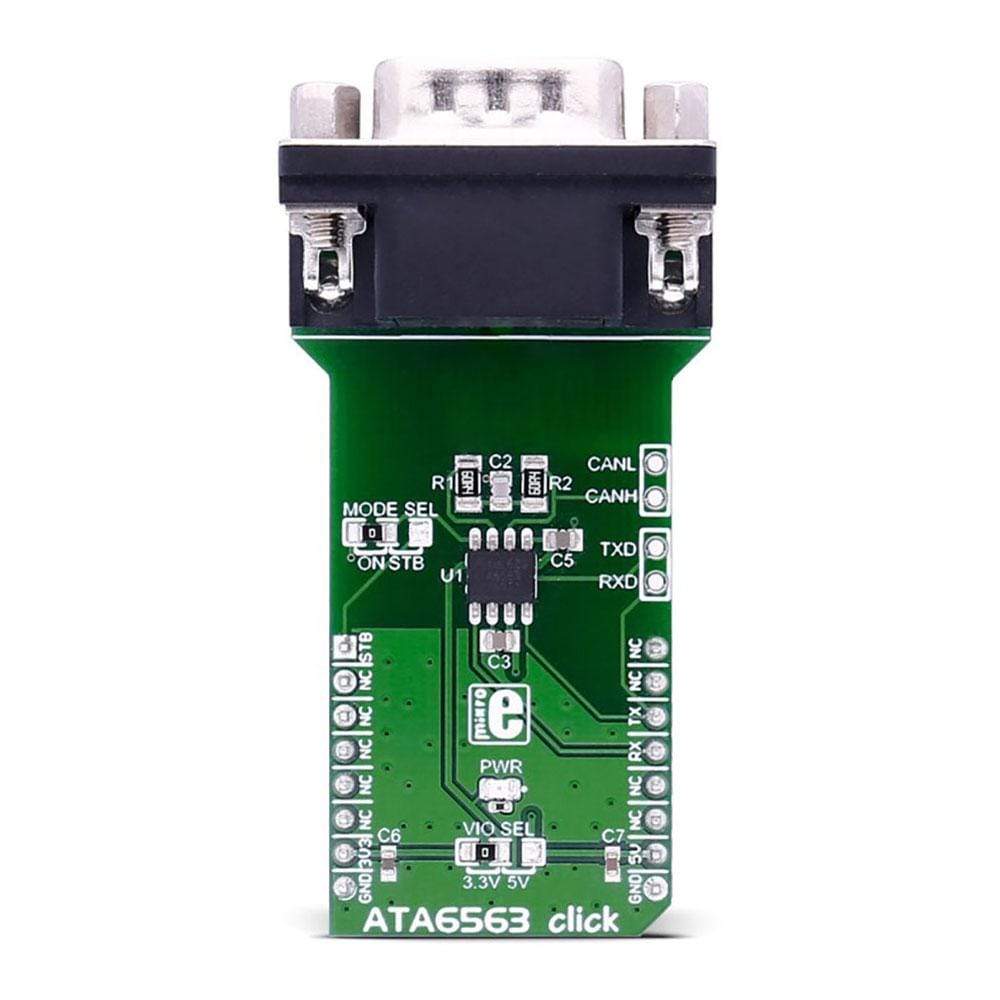
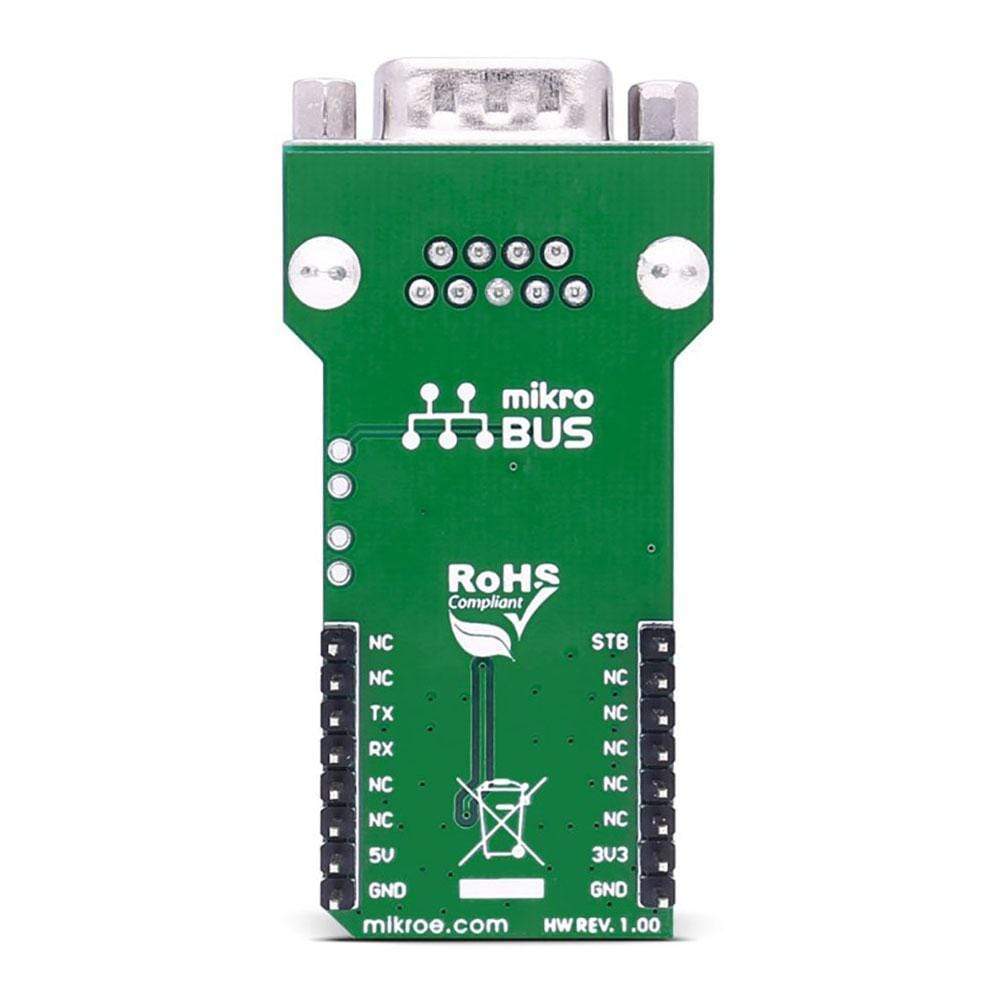
The ATA6563 Click Board™ carries the ATA6563 high-speed CAN transceiver. The Click Board™ is designed to run on a 5V power supply. Use the VIO SEL jumper for selecting the 3.3V or 5V logic level.
It communicates with the target microcontroller over UART interface, with additional functionality provided by the AN pin on the MikroBUS line.
Downloads
Das ATA6563 Click Board™ enthält den Hochgeschwindigkeits-CAN-Transceiver ATA6563. Das Click Board™ ist für den Betrieb mit einer 5-V-Stromversorgung ausgelegt. Verwenden Sie den VIO SEL-Jumper zur Auswahl des 3,3-V- oder 5-V-Logikpegels.
Es kommuniziert mit dem Zielmikrocontroller über die UART-Schnittstelle, wobei zusätzliche Funktionen durch den AN-Pin auf der MikroBUS-Leitung bereitgestellt werden.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-2334
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.028 kg
|
| Other | |
EAN |
8606018710942
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.