





Mikroelektronika d.o.o.
MCP2542 Click-Platine
MCP2542 Click-Platine
SKU: MIKROE-2299
Verfügbarkeit für Abholungen konnte nicht geladen werden

Overview
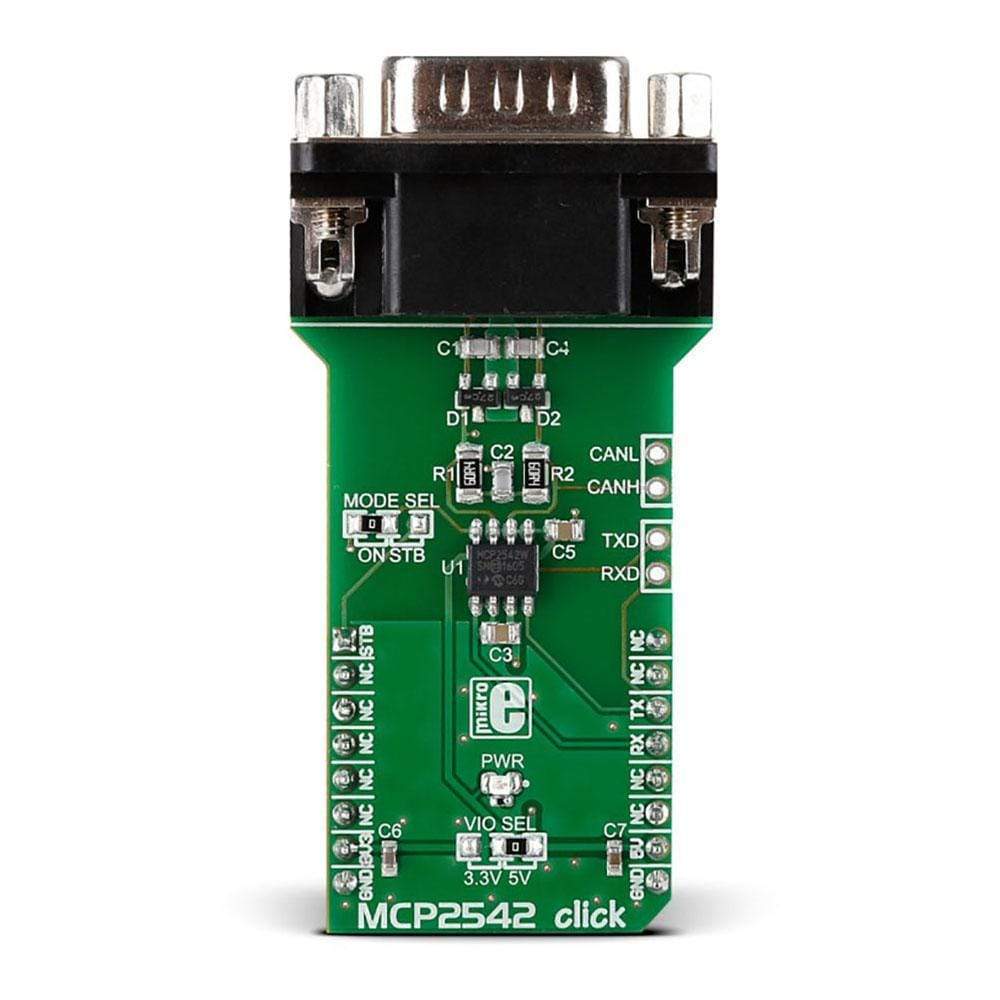
The MCP2542 Click Board™ is the CAN bus transceiver, which allows TTL/CMOS level signals typically found on MCUs, to be used for the communication via the CAN bus, which uses the higher voltage levels and differential signals. In addition, this Click Board™ protects the sensitive MCU part of the device from excessive voltage spikes and electrostatic discharges (ESD), typically observed in automotive systems, where CAN communication is extensively used.
The MCP2542 Click Board™ uses the MCP2542WFD, a CAN FD transceiver, which offers a robust CAN bus interface, with ESD protection up to 13 kV, permanent dominant detection on TXD and CAN bus, battery short circuit and electrical transients suppression on the CAN bus, thermal protection, and more.
Downloads
Das MCP2542 Click Board™ ist der CAN-Bus-Transceiver, der die Verwendung von TTL/CMOS-Pegelsignalen, die typischerweise auf MCUs zu finden sind, für die Kommunikation über den CAN-Bus ermöglicht, der die höheren Spannungspegel und Differenzsignale verwendet. Darüber hinaus schützt dieses Click Board™ den empfindlichen MCU-Teil des Geräts vor übermäßigen Spannungsspitzen und elektrostatischen Entladungen (ESD), die typischerweise in Automobilsystemen auftreten, in denen die CAN-Kommunikation häufig verwendet wird.
Das MCP2542 Click Board™ verwendet den MCP2542WFD, einen CAN-FD-Transceiver, der eine robuste CAN-Bus-Schnittstelle mit ESD-Schutz bis zu 13 kV, permanenter dominanter Erkennung auf TXD und CAN-Bus, Batteriekurzschluss- und elektrischer Transientenunterdrückung auf dem CAN-Bus, Wärmeschutz und mehr bietet.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-2299
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.035 kg
|
| Other | |
EAN |
8606015078526
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.