


Mikroelektronika d.o.o.
Buck 14 Klickbrett
Buck 14 Klickbrett
SKU: MIKROE-3847
Verfügbarkeit für Abholungen konnte nicht geladen werden


Overview
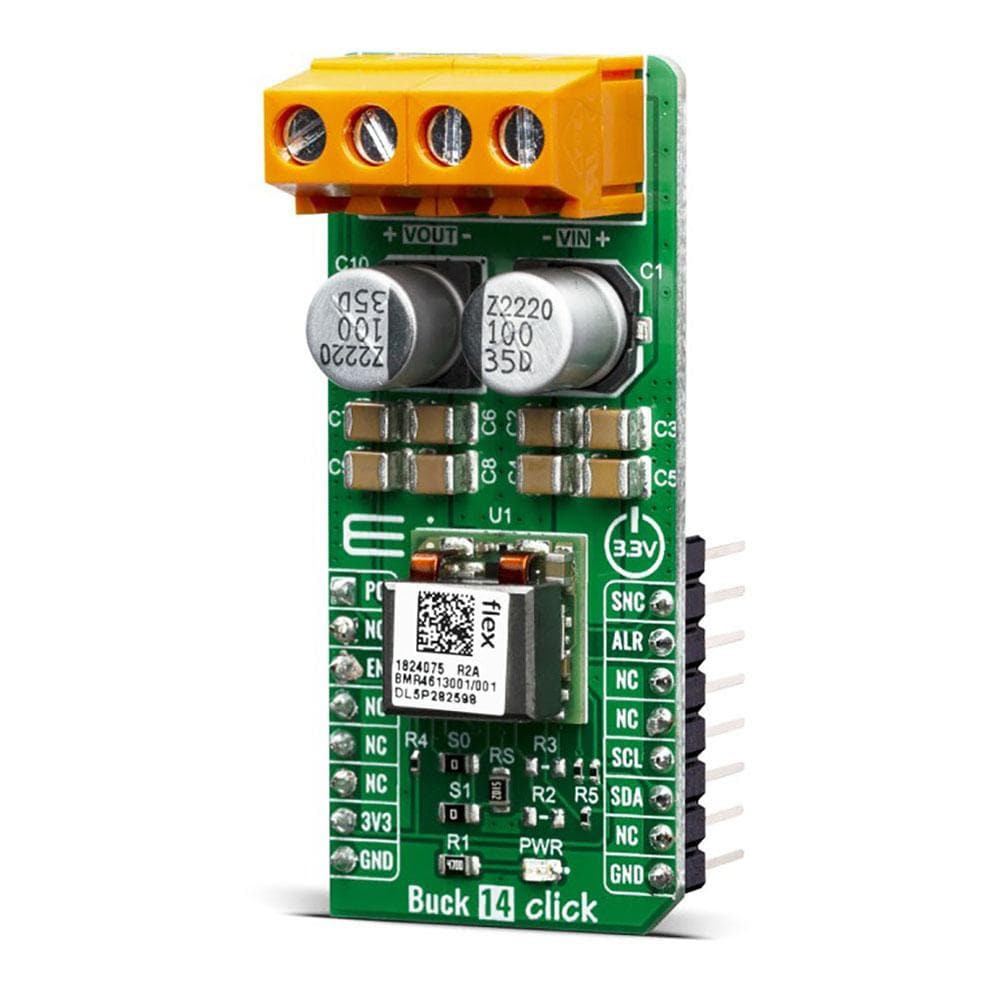
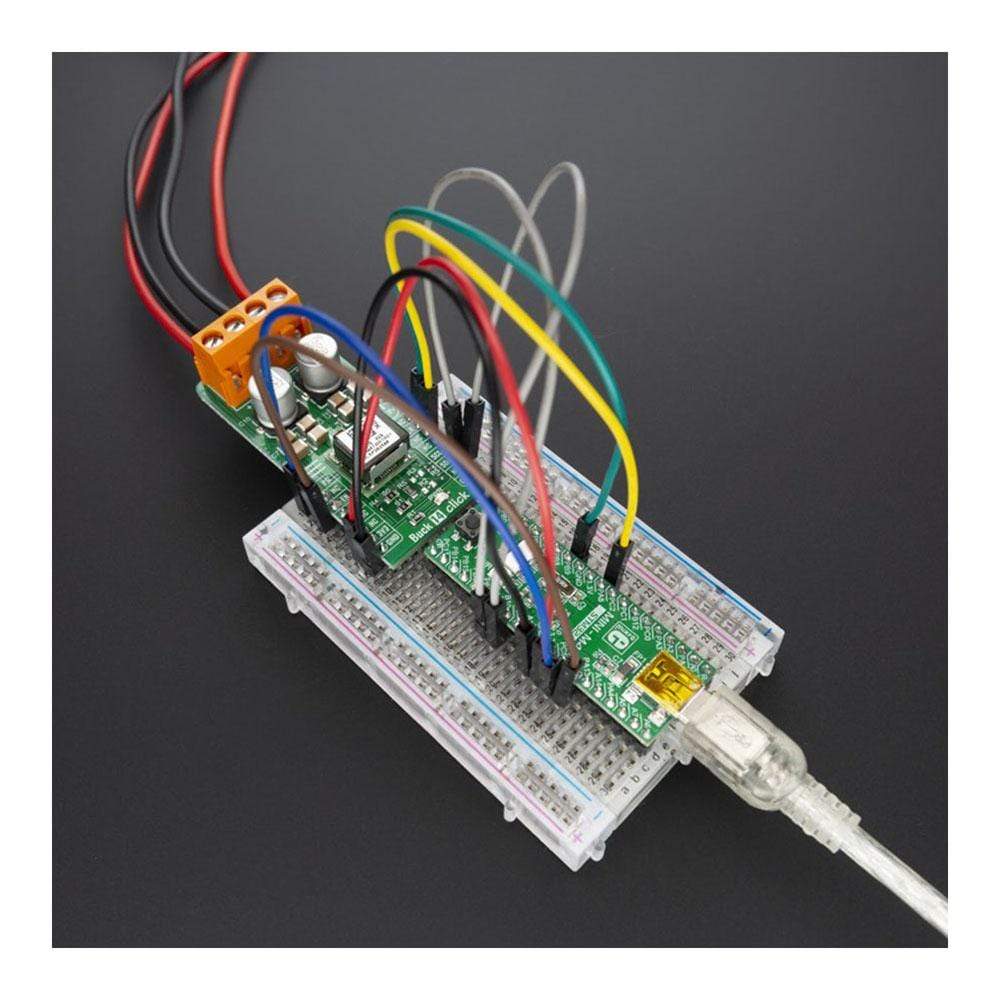
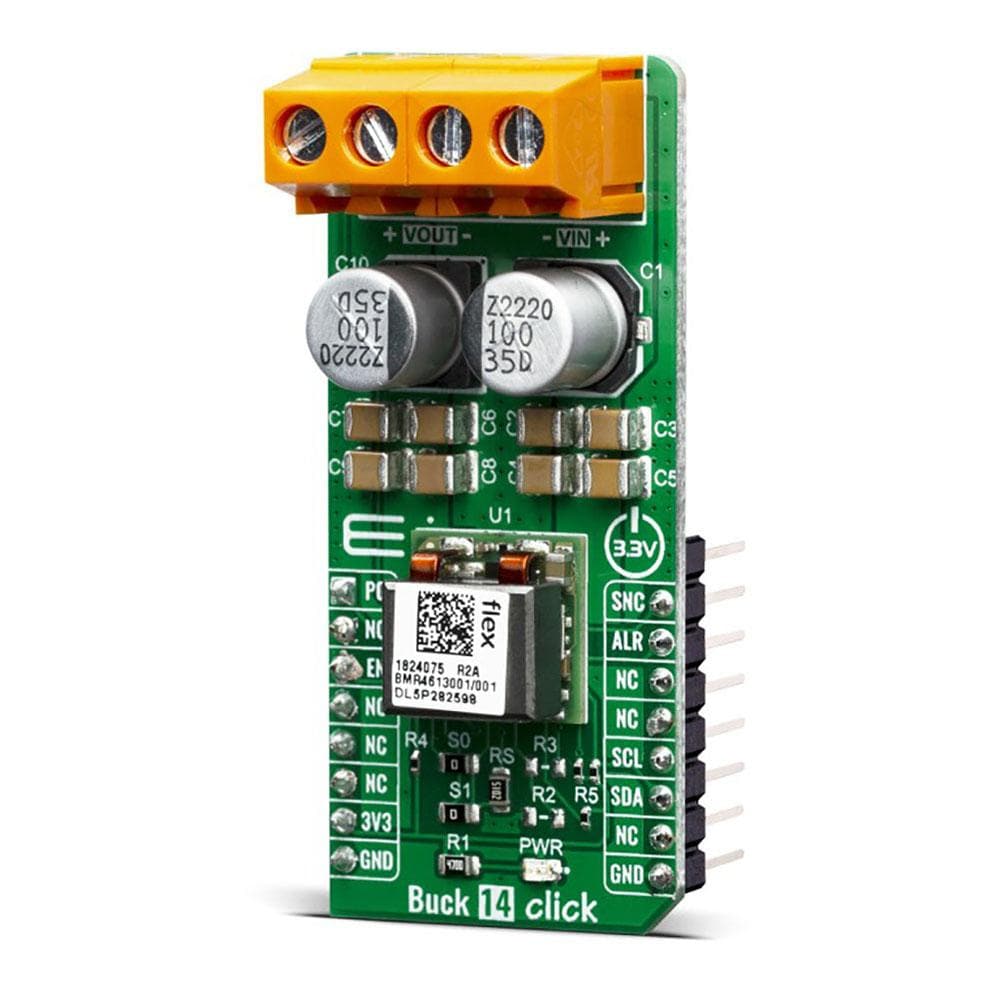
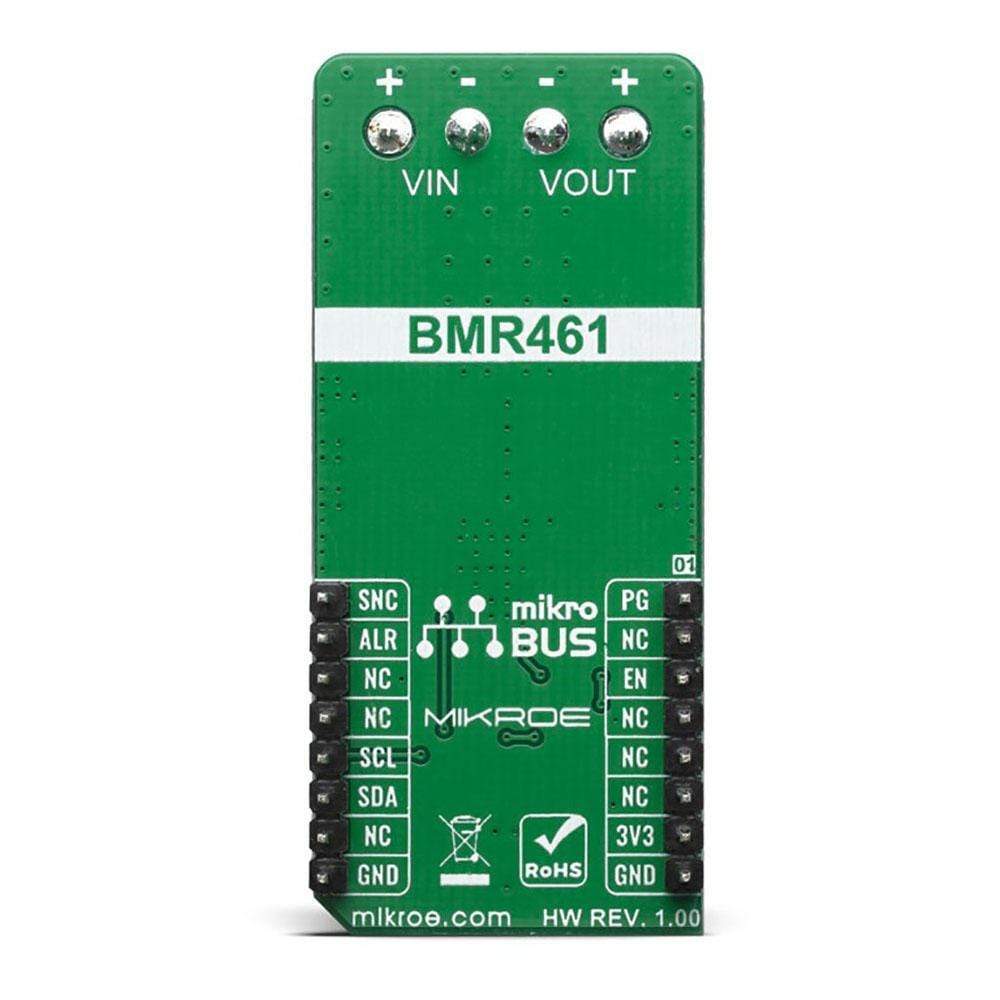
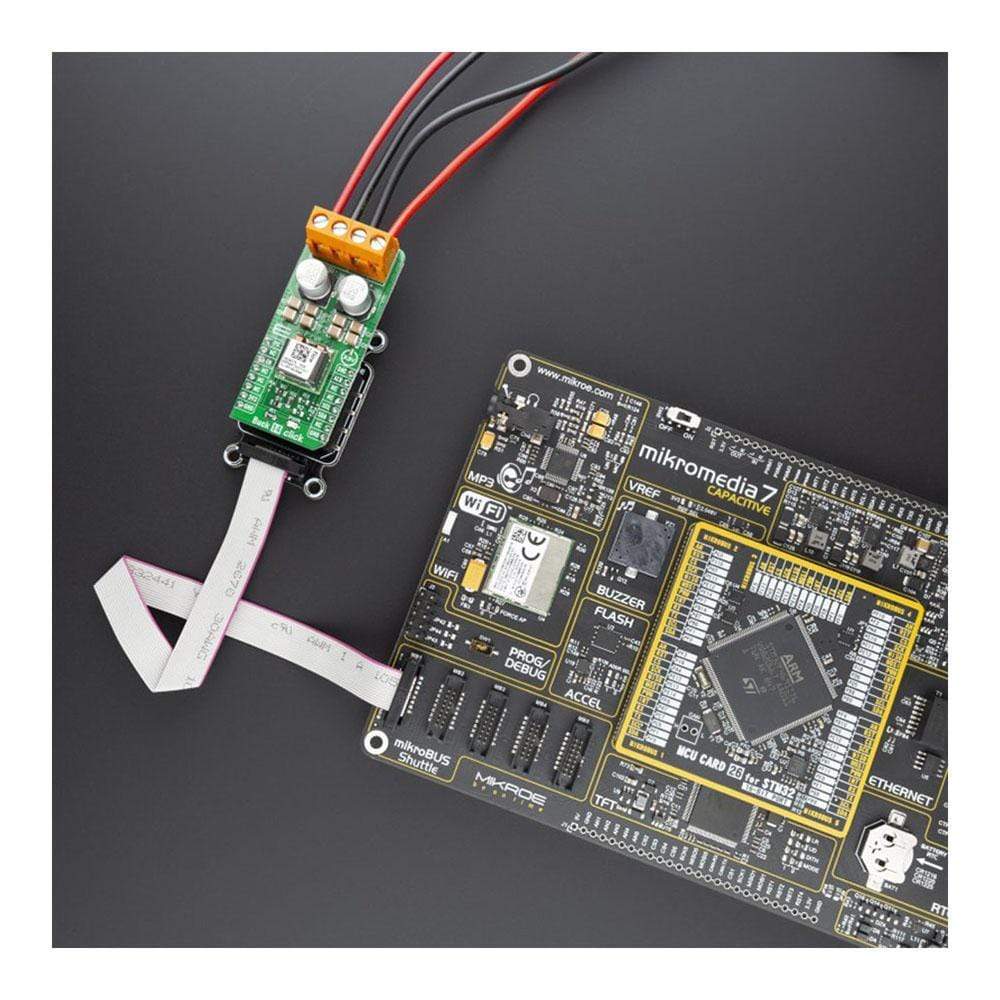
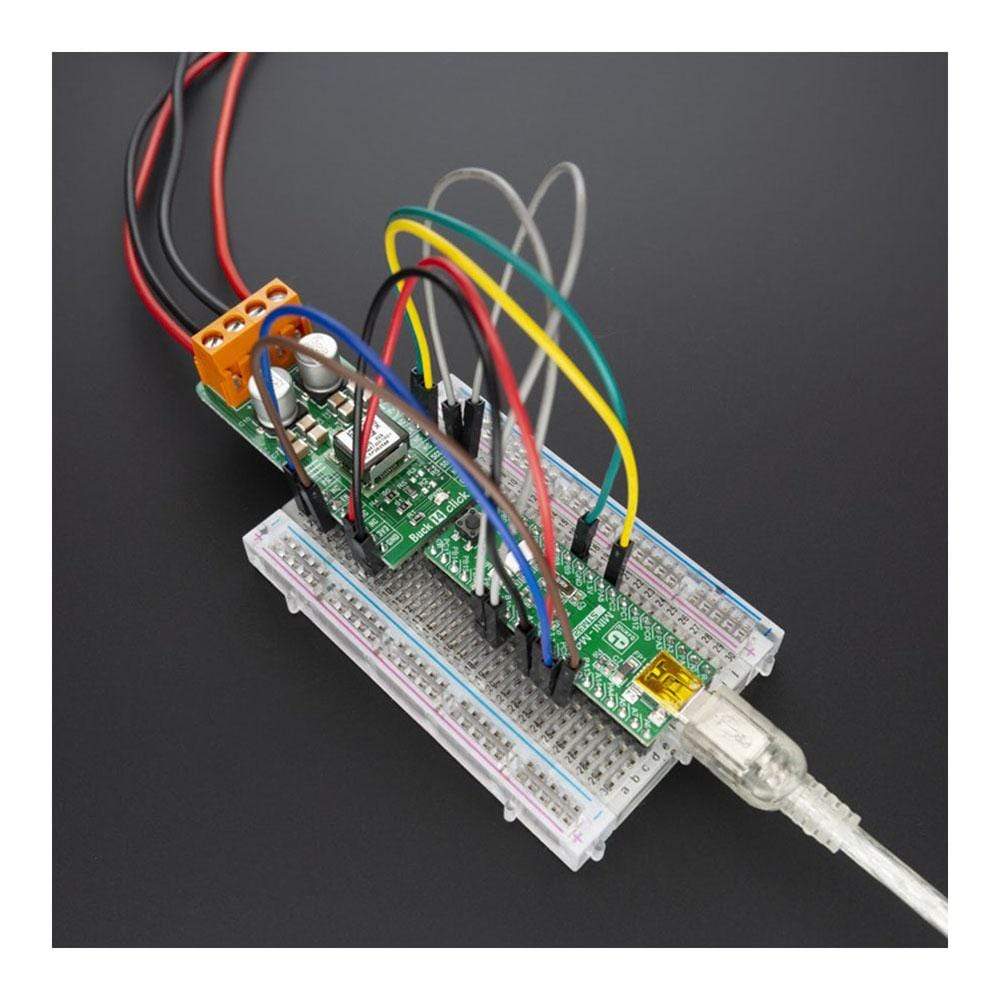
The Buck 14 Click Board™ is based around the BMR4613001/001, a PoL regulator from Flex. It's a high-efficiency step-down converter that provides a highly regulated output voltage derived from the connected power source, rated from 4.5 to 14V. The regulated output voltage can be selected between 0.6V and 5V.
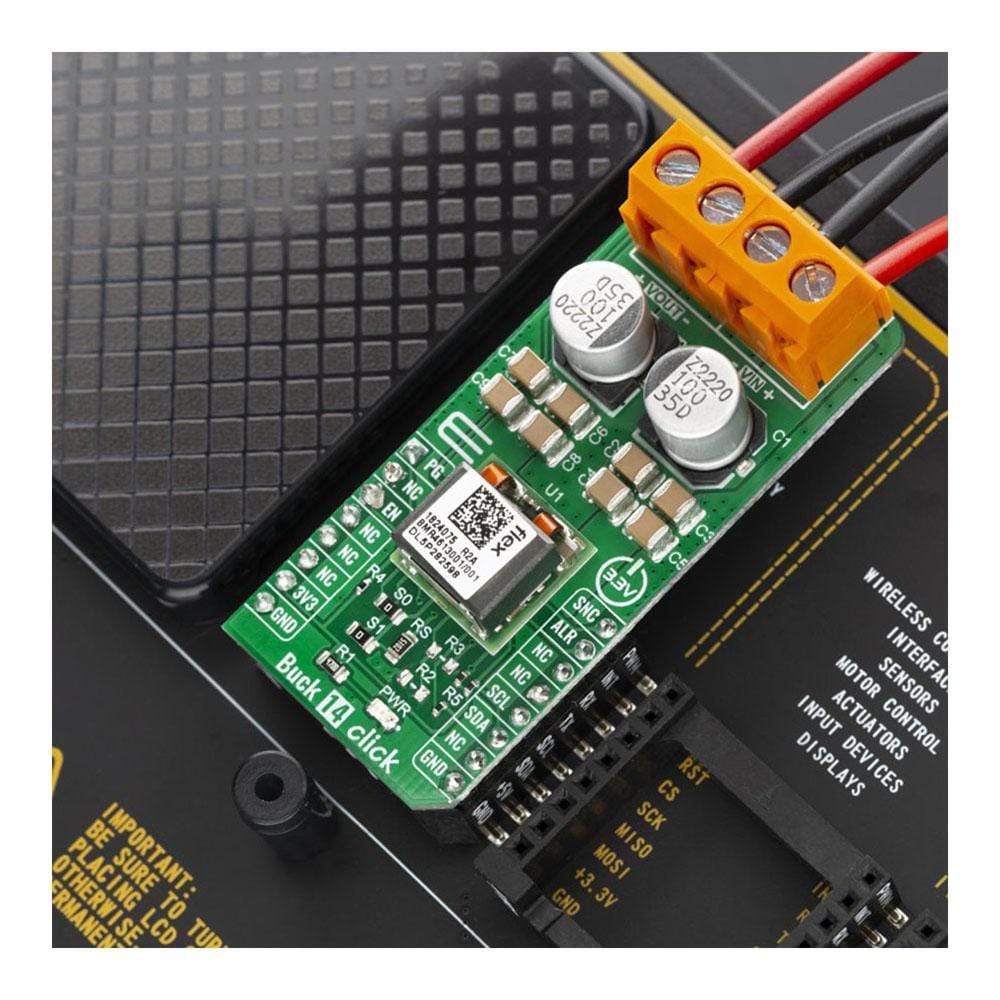
The Buck 14 Click Board™, due to the high efficiency of BMR4613001/001 allows the Click Board™ to easily deliver up to 12A of current with a maximum of 60W of power and high efficiency, typically 96 % at 12Vin, 5Vout and 80% load.
Downloads
Das Buck 14 Click Board™ basiert auf dem BMR4613001/001, einem PoL-Regler von Flex. Es handelt sich um einen hocheffizienten Abwärtswandler, der eine hochregulierte Ausgangsspannung von 4,5 bis 14 V liefert, die von der angeschlossenen Stromquelle abgeleitet wird. Die geregelte Ausgangsspannung kann zwischen 0,6 V und 5 V gewählt werden.
Dank der hohen Effizienz des BMR4613001/001 kann das Buck 14 Click Board™ problemlos bis zu 12 A Strom mit einer maximalen Leistung von 60 W und einer hohen Effizienz liefern, typischerweise 96 % bei 12 Vin, 5 Vout und 80 % Last.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-3847
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.02 kg
|
| Other | |
EAN |
8606018719525
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.