




Mikroelektronika d.o.o.
Winkel 3 Klickbrett
Winkel 3 Klickbrett
SKU: MIKROE-2755
Verfügbarkeit für Abholungen konnte nicht geladen werden
Overview
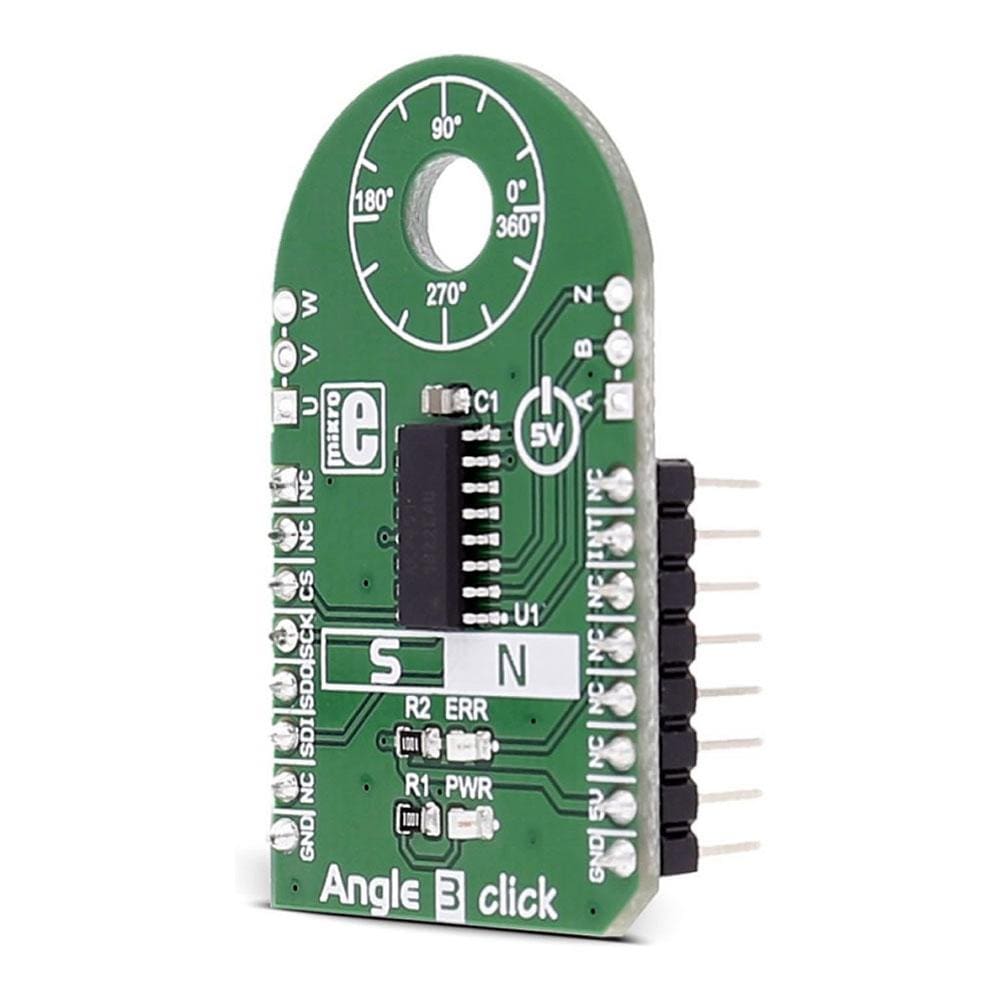
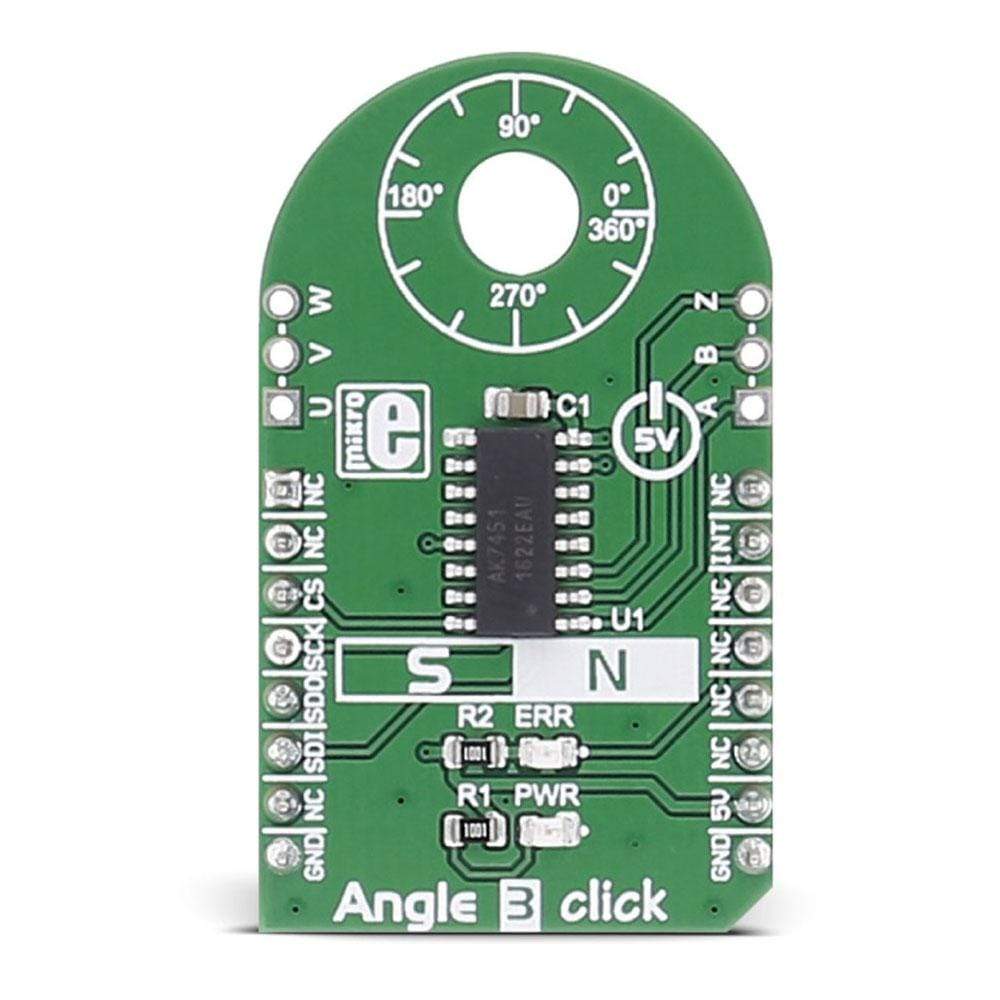
The Angle 3 Click Board™ carries the AK7451, a magnetic rotational angle sensor. The Click Board™ is designed to run on a 5V power supply.
It communicates with the target microcontroller over SPI interface, with additional functionality provided by the INT pin on the MikroBUSline.
Downloads
Das Angle 3 Click Board™ enthält den AK7451, einen magnetischen Drehwinkelsensor. Das Click Board™ ist für den Betrieb mit einer 5-V-Stromversorgung ausgelegt.
Es kommuniziert mit dem Zielmikrocontroller über die SPI-Schnittstelle, wobei zusätzliche Funktionen durch den INT-Pin auf der MikroBUS-Leitung bereitgestellt werden.
| General Information | |
|---|---|
Part Number (SKU) |
MIKROE-2755
|
Manufacturer |
|
| Physical and Mechanical | |
Weight |
0.018 kg
|
| Other | |
EAN |
8606018711420
|
Frequently Asked Questions
Have a Question?
Be the first to ask a question about this.